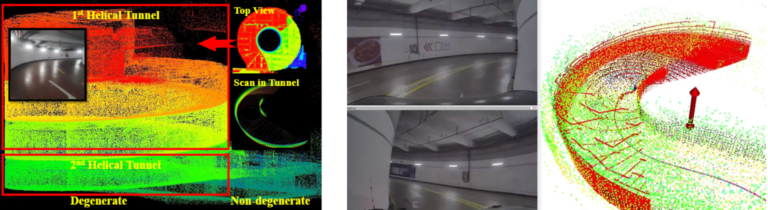
【图/文 王健丞】几何特征重复引发的退化问题,始终是里程计、同步定位与地图构建(SLAM)等机器人位姿估计系统…
Read more分类: Journal&Conference
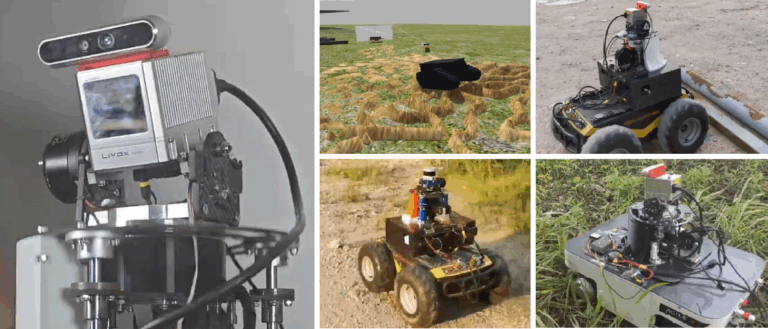
TFR2025-Terrain-Adaptive Planning of a Mobile Robot with a Multi-Axis Gimbal System for Stable SLAM
【图/文 王志濠、李鸣航】机器人或汽车在平坦地形或城市环境中的同步定位与地图构建 (SLAM) 已由成熟的解决…
Read more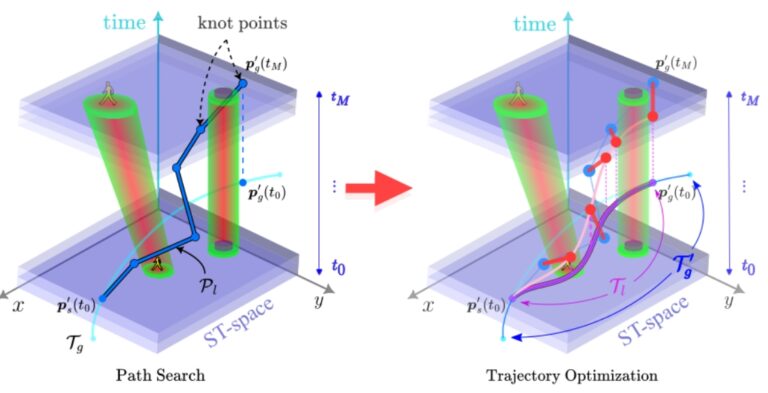
RA-L 2025: A State-Time Space Approach for Local Trajectory Replanning of an MAV in Dynamic Indoor Environments
【图/文 全凤宇】多旋翼无人机(MAV)在狭小且不断变化的室内环境中,需要可靠的规划能力以避开移动中的行人。 …
Read more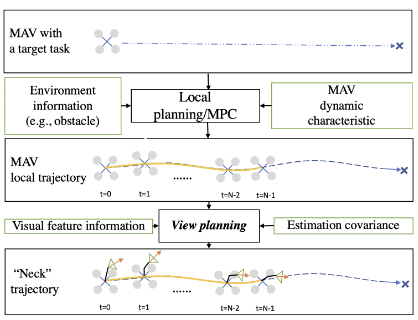
T-AES 2024: A Covariance-based View Planning Algorithm for Aerial Robots with Decoupled Vision System
【图/文 华政宇】在特征稀疏环境中,空中机器人的视觉里程计的精度和鲁棒性会受到很大影响。为了提升微型…
Read more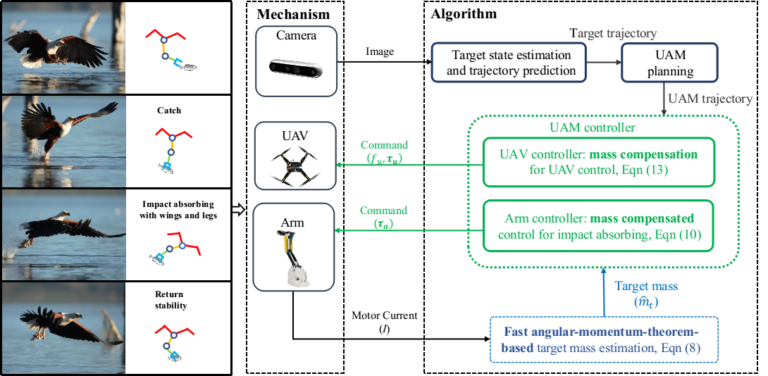
RA-L 2024: Impact Absorbing and Compensation for Heavy Object Catching with an Unmanned Aerial Manipulator
【图/文 王思强】该工作面向飞行机械臂(UAM)抓取未知质量的快速运动目标任务,设计了一种用于冲击吸收和维持飞…
Read more新闻速递-NROS-Lab 三篇论文被机器人顶会ICRA2024接收
Zhihao Wang, Shixing Huang, Minghang Li, Junyuan Ouyang…
Read more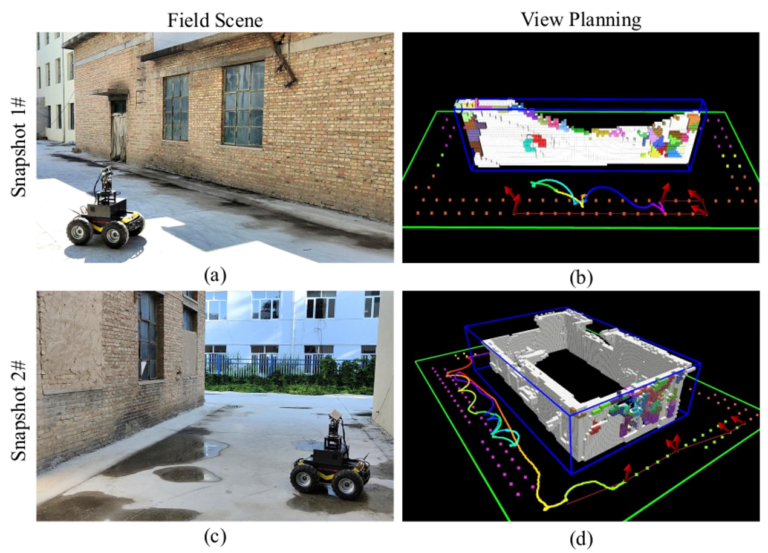
TIM2023: Object-Aware View Planning for Autonomous 3D Model Reconstruction of Buildings Using a Mobile Robot
【图/文 李宇翔】代码开源地址为:https://github.com/HITSZ-NRSL/active_m…
Read more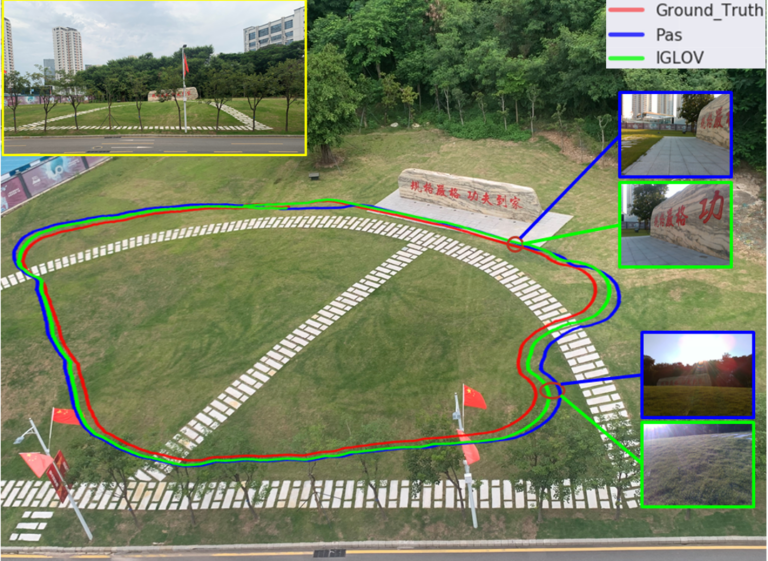
TMECH2024: Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling
【图/文 王志濠】该工作面向野外机器人作业过程中的自主定位需求,针对野外环境下地形崎岖以及纹理分布不均等严…
Read more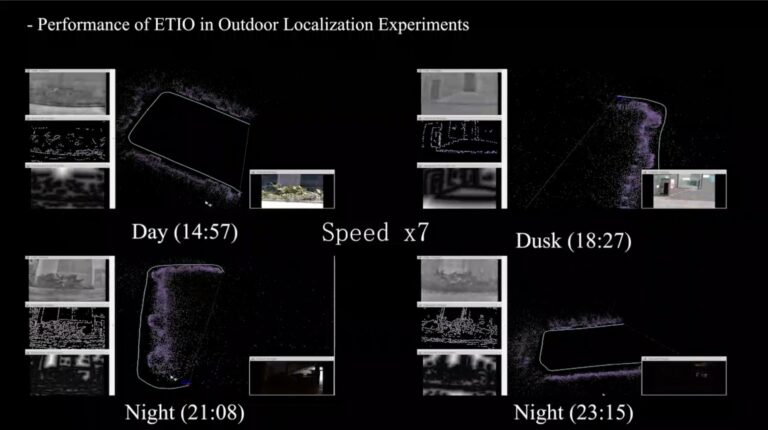
最新:NROS-Lab发表视觉退化场景下的国际上首个边缘红外惯性里程计
【图/文 王煜】针对可见光相机在灾害救援场景中容易出现的视觉退化问题,项目组提出了世界上首个基于边缘信息的红外…
Read more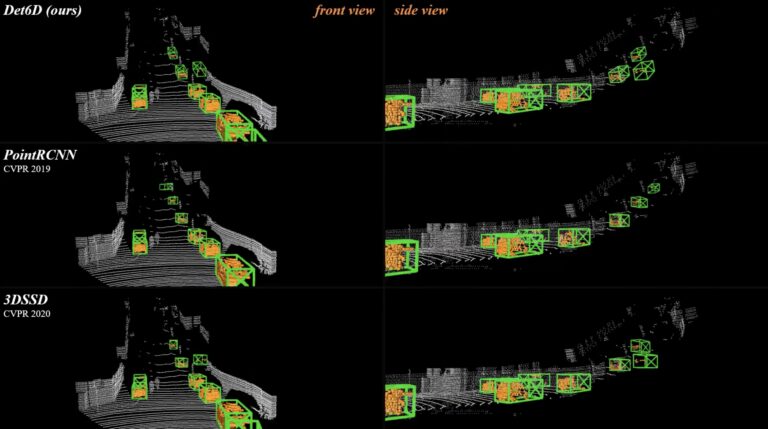
TIM2022:NROS-Lab releases the source code of Det6D, a full-degree-of-freedom 3D object detector
[图文欧阳俊源] NROSLab has recently made public its latest re…
Read more