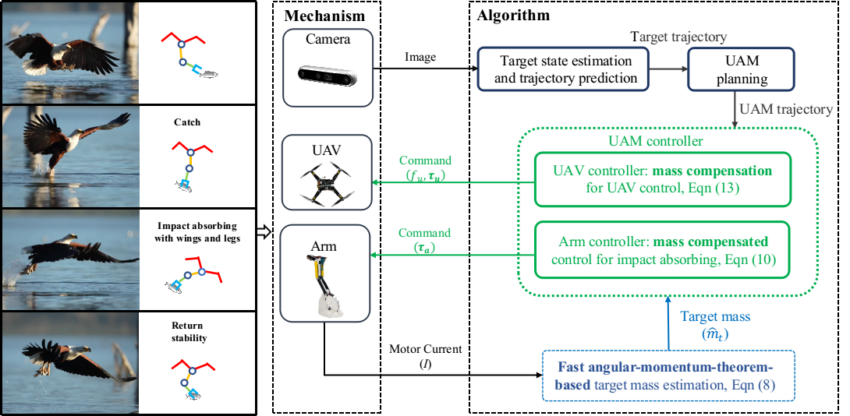
【图/文 王思强】该工作面向飞行机械臂(UAM)抓取未知质量的快速运动目标任务,设计了一种用于冲击吸收和维持飞行稳定的方法。如图1所示,该工作提出了基于角动量定理的快速目标质量估计算法,用于在有限的捕获时间内估计目标的质量。利用估计的目标质量,该工作为基于无刷电机的机械臂设计了阻抗控制器以吸收冲击,并在飞行机械臂的位置姿态控制器中进行了质量补偿。结合以上方法,该工作提出了用于空中捕获后稳定性的AIC_MC方法。仿真和实验表明,所提出的方法可以有效吸收目标的冲击并减小UAM的角度/位置位移。这种方法可以应用于在现实世界中捕获重型目标,并确保UAM的飞行安全性。
https://www.bilibili.com/video/BV18U421Z7VR?t=18.8
主要贡献:
- 首先,该工作对目标和UAM之间的接触进行分析和建模。基于接触模型,该工作提出了一种新颖的快速目标质量估计算法,能够在0.1秒内估计目标的质量。
- 其次,该工作在关节空间中设计了阻抗控制器,用于UAM的机械臂部分。这个控制器能够有效吸收目标的动能,减小UAM的角度偏移。
- 该工作开发了一种补偿算法,用于UAM的位置/姿态控制器。这个算法可以减轻在捕获目标后由质心位移引起的跟踪误差。
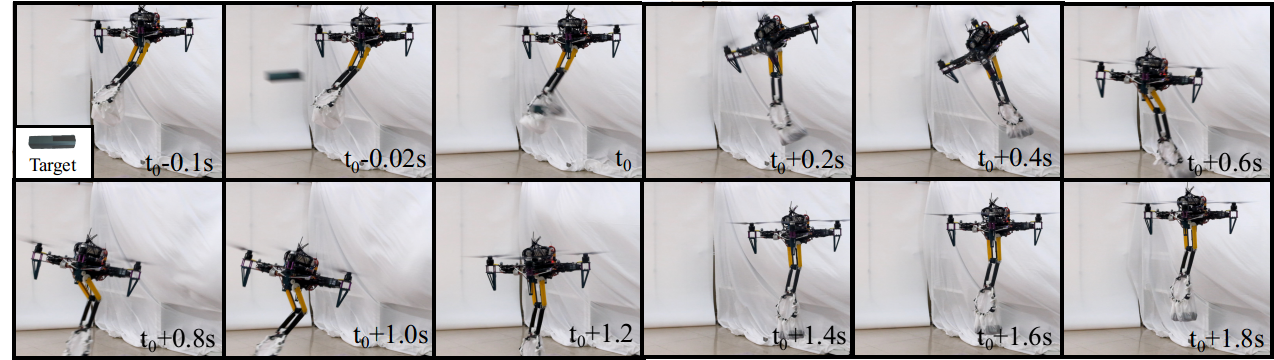
- 通过组合上述方法,UAM成功展示了捕获快速飞行目标(速度为10m/s),并且该目标具有相当大的重量(相当于UAM质量的25%),同时保持系统稳定性的能力。
论文引用为: Siqiang Wang, Zongyu Ma, Fengyu Quan, and Haoyao Chen, “Impact Absorbing and Compensation for Heavy Object Catching with an Unmanned Aerial Manipulator”, IEEE Robotics and Automation Letters, accepted, 2024.