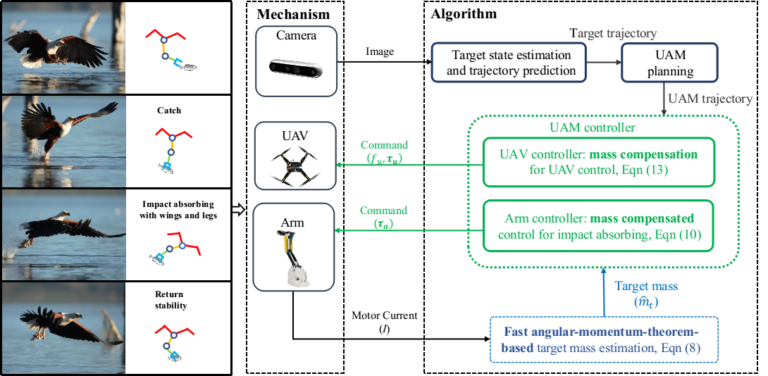
RA-L 2024: Impact Absorbing and Compensation for Heavy Object Catching with an Unmanned Aerial Manipulator Posted on 2024-02-022024-02-02 【图/文 王思强】该工作面向飞行机械臂(UAM)抓取未知质量的快速运动目标任务,设计了一种用于冲击吸收和维持飞… Read more