[图文欧阳俊源]
NROSLab has recently made public its latest research, Det6D, and expects researchers and the community to improve this work together.
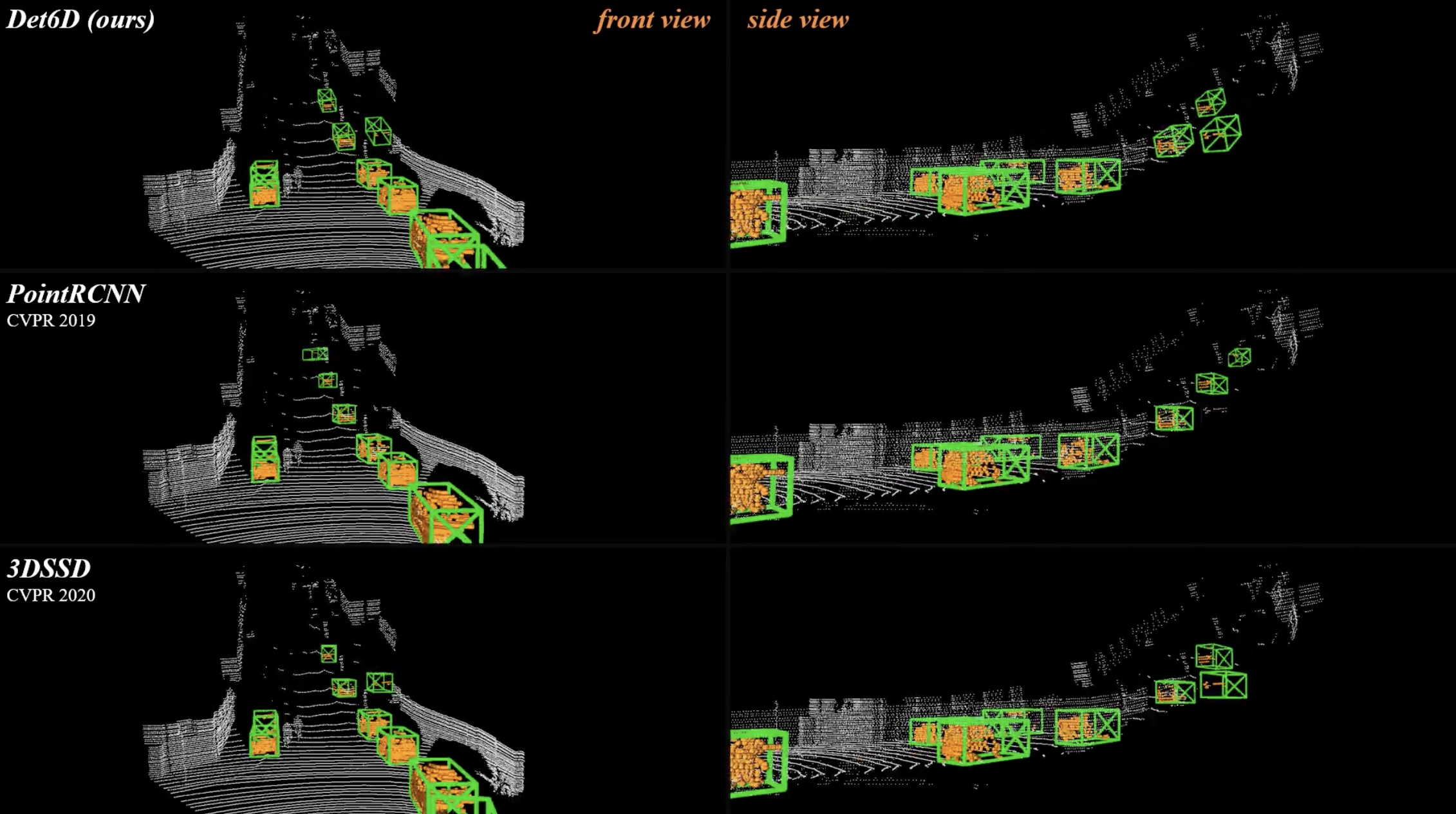
Det6D is the first point cloud 3D object detector with 9DoFs object BBoxes output, providing more robust and accurate detection results for ground robots in urban complex terrain.
- Lefts the existing 2.5D-like 3D object detection to real 3D object detection without space and pose limitations.
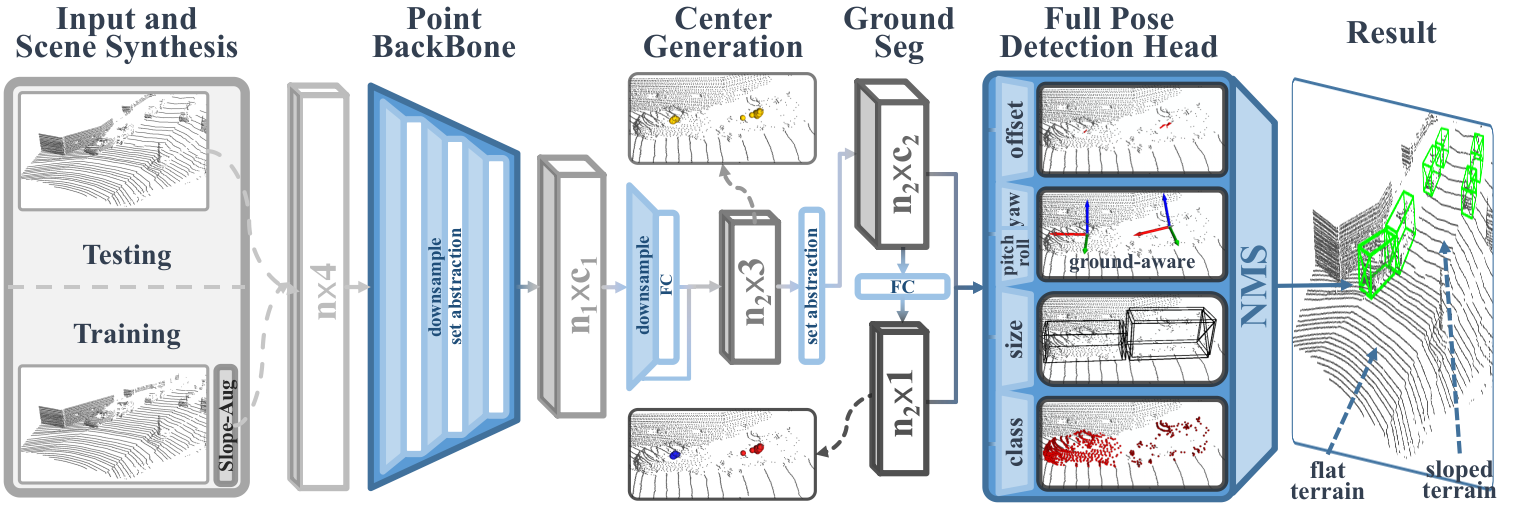
- Introduces a ground segmentation module, which enables the network to implicitly learn the relationship between the pitch and roll of the ground robot and the normal vector of the local surrounding ground plane.
- Pseudo-slope enhancement is proposed to leverage the number of open datasets with only 2.5D annotations for full-pose object detector training.
Junyuan Ouyang and Haoyao Chen, “Det6D: A Ground-Aware Full-Pose 3D Object Detector for Improving Terrain Robustness.” IEEE Transactions on Instrumentation and Measurement, online, 2022
access the code: [HITSZ-NRSL/De6D: [IEEE TIM] Det6D: A Ground-Aware Full-Pose 3D Object Detector for Improving Terrain Robustness (github.com)](https://github.com/HITSZ-NRSL/De6D)