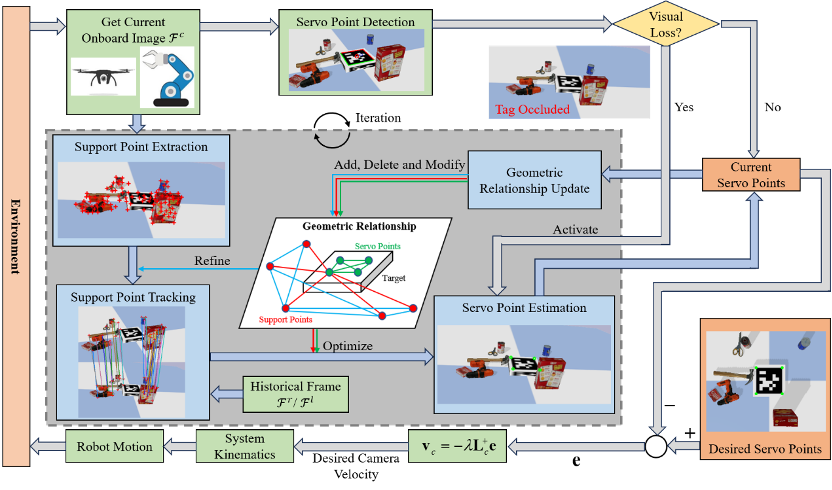
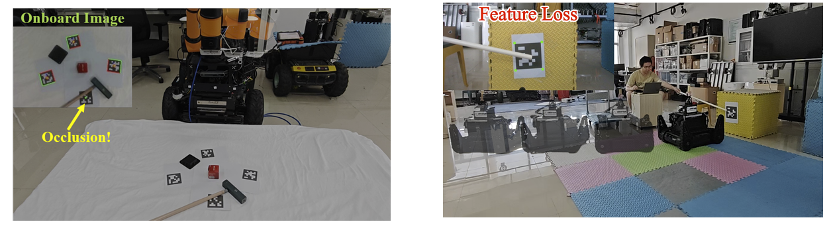
【图/文 贺睿】基于图像的视觉伺服(Image-based visual servoing, IBVS)通过持续的视觉信号反馈引导机器人系统到达目标位置。然而,诸如物体遮挡和相机漂移等干扰可能导致视觉信号丢失,最终引发伺服失败。我们提出了一种新颖的连续型基于图像的视觉伺服方法(Continuous IBVS, CIBVS),以应对潜在的视觉信号丢失问题。该方法在自然特征与伺服特征的位置之间建立了一种几何关系。在每次迭代中,CIBVS首先对帧间的自然特征进行粗略匹配,并利用所提出的基于几何关系的优化评分机制剔除错误匹配对。当发生视觉信号丢失时,CIBVS利用自然特征及上述几何关系,通过优化算法估计丢失的伺服特征,从而确保持续、稳定的视觉反馈生成。在仿真实验中,CIBVS在三种场景下共进行了750次测试,结果表明其在任务成功率和估计精度方面均有显著提升。在真实环境中,CIBVS被集成到多种机器人系统中,包括机械臂、无人机和地面车辆,以完成多种任务。实验结果表明,在存在视觉信号丢失的场景下,CIBVS在伺服成功率、估计精度和收敛速度方面均明显优于EKF-IBVS和VO-IBVS方法。
主要贡献:
- 提出了一种新颖的连续型基于图像的视觉伺服方法(CIBVS),以应对伺服过程中可能出现的视觉信号丢失问题。与现有方法相比,CIBVS无需相机运动信息或里程计数据,并能更有效地处理长时间特征丢失的情况。
- 建立了场景中支撑点(support points)与伺服点(servo points)之间的几何关系。基于该关系,我们设计了一种新颖的支撑点跟踪算法,以提供高质量的跟踪点,并构建了一个优化问题用于估计丢失的伺服点状态。消融实验验证了这些设计在提升CIBVS性能方面的有效性。
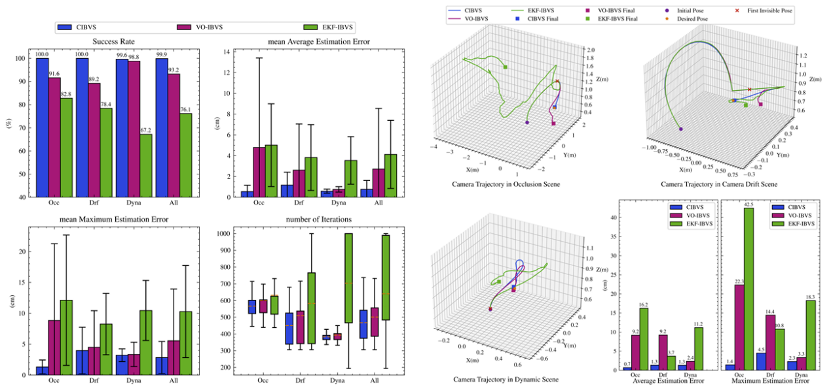
- 所提出的CIBVS方法已在多种真实世界的机器人系统上部署,用于执行多样化的任务,展现出强大的通用性,并在伺服成功率、估计精度和收敛速度方面显著优于EKF-IBVS和VO-IBVS方法。
论文引用为:
Rui He, Yuan Xuan, Hongkang Cui, Peng Li*, Haoyao Chen*, “CIBVS: Continuous Image-Based Visual Servoing against Visual Signal Loss”, IEEE/ASME Transactions on Mechatronics, January, 2026.