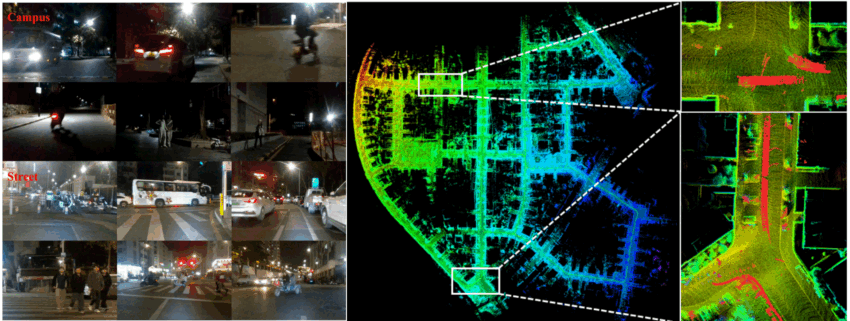
【图/文 王煜】本工作提出了DynaLOAM,一种面向动态环境的激光雷达SLAM框架,旨在解决动态环境下激光SLAM中数据关联不可靠、地图存在残留拖影的问题,从而提升动态场景下的位姿估计精度与静态地图构建质量。
DynaLOAM包含三大核心模块:前端激光雷达里程计、后端激光雷达建图及回环检测校正模块。前端通过轻量级检测器GIA-SSD(网格引导实例感知单阶段检测器)快速识别并滤除激光雷达视场中预定义的高动态目标(如车辆、行人)特征,结合空间几何一致性约束剔除动态路标或错误匹配的对应关系,实现粗略但实时的位姿估计;后端提出基于可见性与聚类的在线子图清理方法(SCVC),通过可见性分析初步区分静态与动态点云,结合PCA特征还原误分类静态点,并基于聚类的实例级动态分割进一步优化,完成动态目标移除与静态子图维护,再通过扫描-地图配准实现位姿优化;回环检测校正模块利用Scan Context进行地点识别,触发回环时结合可见性检查滤除全局地图中残留动态目标,消除累积漂移,确保全局位姿与地图一致性。通过融合外观检测与可见性检查的互补特性,DynaLOAM最终实现动态环境下精准的位姿估计与无虚影静态地图构建。

图1:DynaLOAM系统架构。
本文的主要创新点:
- 提出了一种新型动态激光SLAM框架DynaLOAM。该框架利用先验外观与可见性检查的互补性来抑制动态干扰。在公共数据集和真实场景中进行的实验表明,该框架在动态环境下的位姿估计和建图任务中表现出良好性能。
- 设计了轻量级网络GIA-SSD,用于检测并滤除预定义的高动态目标类别。所提出的采样和查询算子解决了基于点云的3D检测器在效率方面的瓶颈问题,使其运行速度提升10倍,且性能未显著下降。这种高效率大幅压缩了检测延迟,为位姿估计、子图清理等下游模块释放了更多资源。
- 提出了一种基于可见性与聚类的在线子图清理方法(SCVC),用于实时移除动态目标。基于聚类的移除方案可在实例级别实现动态目标移除,以避免残留。与当前主流方法相比,SCVC的误分类点数量最少,且能以激光雷达的帧率实时运行。
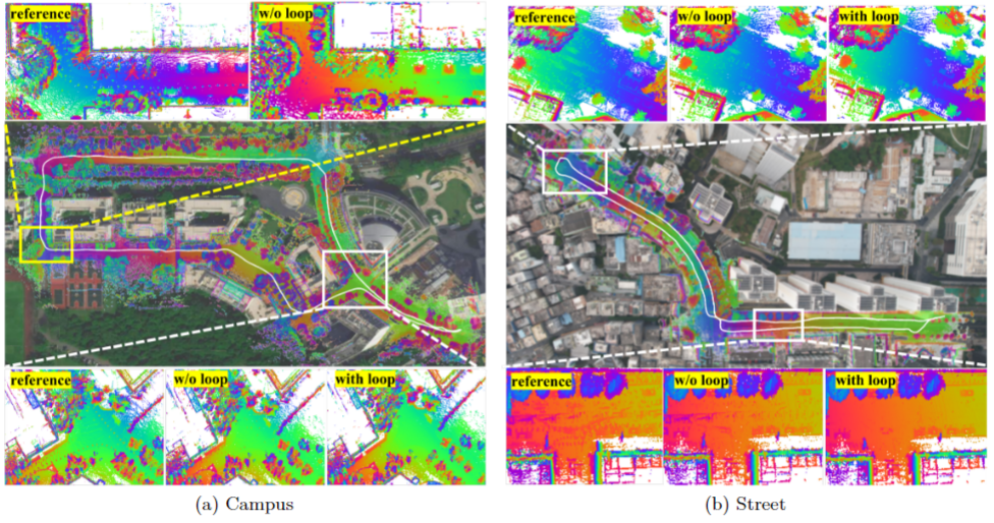
图2:DynaLOAM在室外场景中的建图性能。“reference”:由原始点云累积生成的地图;“w/o loop”:机器人首次遍历该区域时生成的地图;“with loop”:机器人重访该区域并触发回环校正后优化地图。