

论文题目:复杂环境下异构多机器人的协同自主探索 主要的贡献点:1. 采用八叉树的地图表征框架,通过点云统计属性…
Read more
T-RO 2025: Real-Time Multi-Level Terrain-Aware Path Planning for Ground Mobile Robots in Large-Scale Rough Terrains
【图/文 李宇翔】该工作面向大范围复杂地形的地面移动机器人导航任务,设计了一种多层级地形感知路径规划框架。如图…
Read more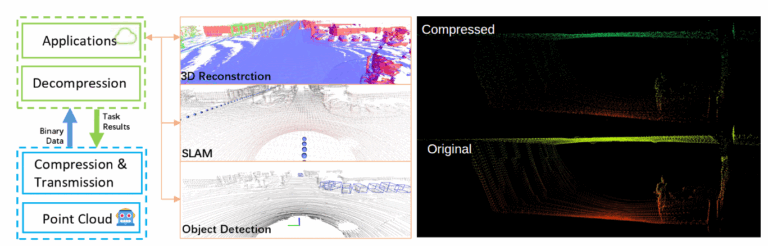
ICRA2025-Real-Time LiDAR Point Cloud Compression and Transmission for Resource-constrained Robots
【图/文 曹宇豪】激光雷达因其能够提供精确的环境结构信息而被广泛应用于自主机器人。然而,点云数据量巨大,给数据…
Read more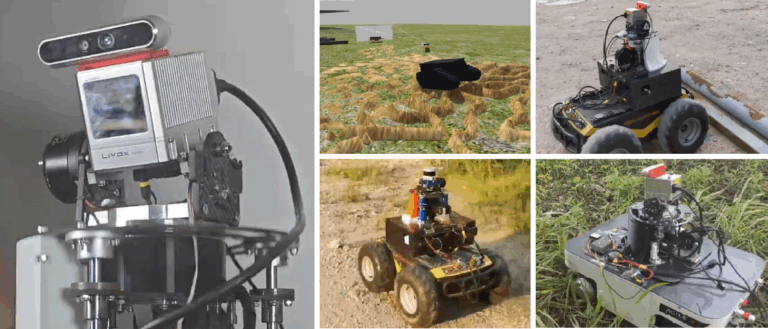
TFR2025-Terrain-Adaptive Planning of a Mobile Robot with a Multi-Axis Gimbal System for Stable SLAM
【图/文 王志濠、李鸣航】机器人或汽车在平坦地形或城市环境中的同步定位与地图构建 (SLAM) 已由成熟的解决…
Read more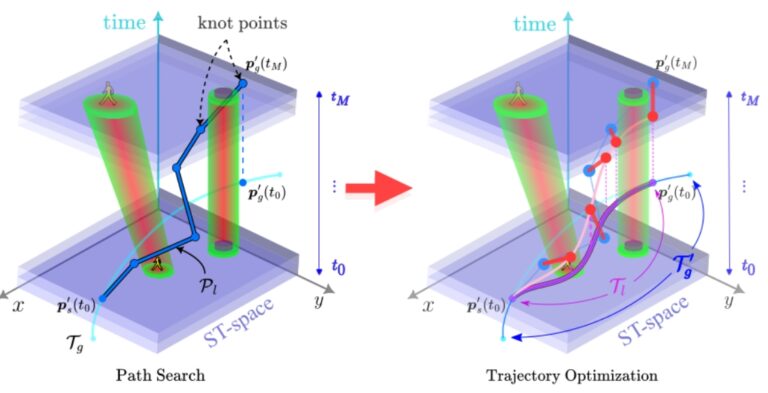
RA-L 2025: A State-Time Space Approach for Local Trajectory Replanning of an MAV in Dynamic Indoor Environments
【图/文 全凤宇】多旋翼无人机(MAV)在狭小且不断变化的室内环境中,需要可靠的规划能力以避开移动中的行人。 …
Read more
祝贺nROS代表队获得美团第二届低空经济智能飞行管理挑战赛冠军
2024年11月29日,美团第二届低空经济智能飞行管理挑战赛榜单揭晓。本次大赛在中国深圳举行,历时3个月102…
Read more祝贺实验室负责人获得深圳市优秀科技创新人才杰出青年基金项目资助
实验室负责人在智能救援机器人领域的研究基础被认可,获得深圳市优秀科技创新人才杰出青年基金项目资助…
Read moreRA-L 2024: Generating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
【图/文 刘培焱】 本文旨在实现OMAV在杂乱环境中的安全飞行。我们提出了一种3阶段轨迹生成框架(图1),为O…
Read more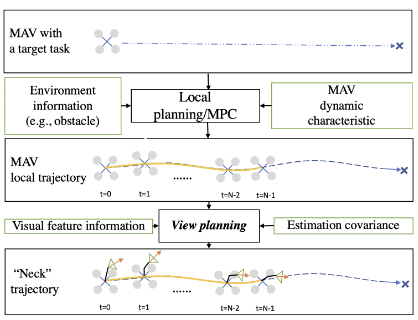
T-AES 2024: A Covariance-based View Planning Algorithm for Aerial Robots with Decoupled Vision System
【图/文 华政宇】在特征稀疏环境中,空中机器人的视觉里程计的精度和鲁棒性会受到很大影响。为了提升微型…
Read more祝贺NROS-Lab 2024届五位毕业生获评黑龙江省普通高等学校“优秀毕业生”或哈尔滨工业大学“优秀毕业生”
根据学校2024届黑龙江省普通高等学校优秀毕业生和哈尔滨工业大学优秀毕业生评选结果,经过激烈的角逐NROS实验…
Read more