分类: Lab News
News in NRSL
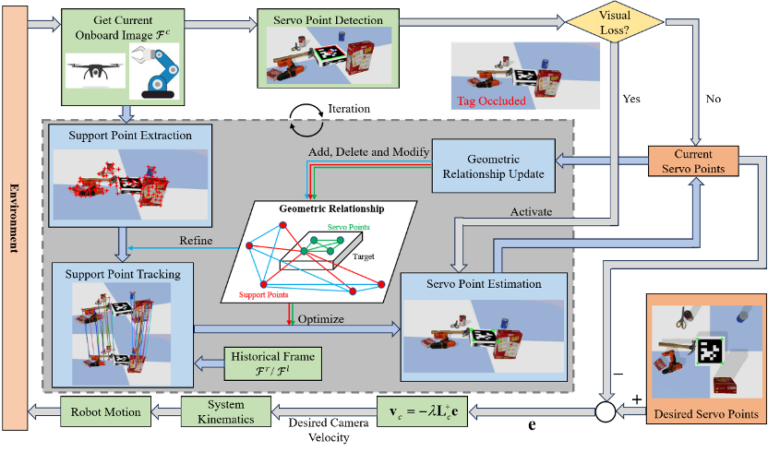
TMECH 2026: CIBVS: Continuous Image-Based Visual Servoing against Visual Signal Loss
【图/文 贺睿】基于图像的视觉伺服(Image-based visual servoing, IBVS)通过持…
Read more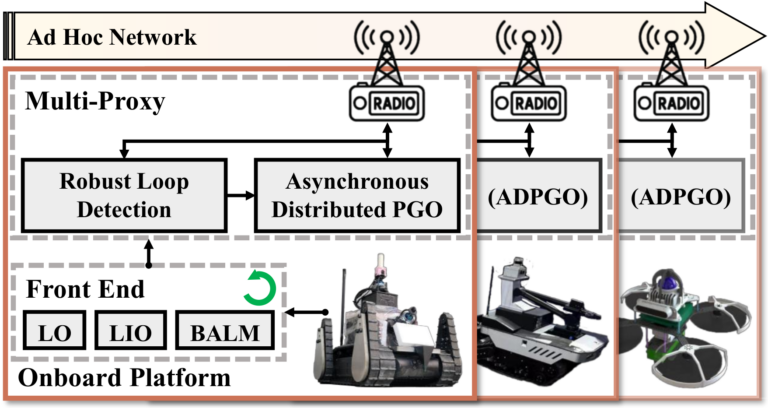
RA-L 2026: Communication-Robust Asynchronous Distributed LiDAR Collaborative Smoothing and Mapping
【图/文 王健丞】在大规模、复杂且受通信约束的环境中,高效的多机器人协作对同步定位与建图(SLAM)系统提出了…
Read more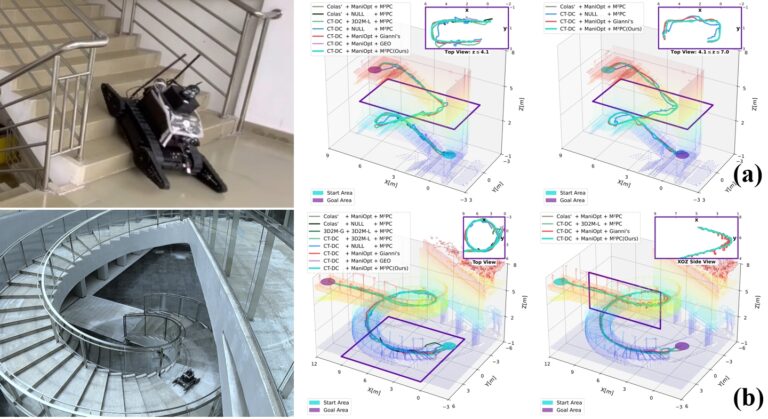
IJRR 2025: TiFA: A Terrain-informed Navigation Framework for Articulated Tracked Robots in Rescue Missions
【图/文 王逸飞】关节式履带机器人(Articulated Tracked Robots, ATRs)非常适用…
Read more
“科工巧手”团队斩获珠海国际灵巧操作挑战赛佳绩
在2025年10月29日举办的“第二届珠海国际灵巧操作挑战赛” 决赛中,由哈尔滨工业大学(深圳)与中科博特智能…
Read more
热烈祝贺实验室代表队斩获CMU Vision-Language-Autonomy挑战赛(CMU-VLA-Challenge)冠军
该比赛由美国卡内基梅隆大学发起全球性顶尖科技赛事,旨在推动具身智能在真实环境与真实机器人中的发展,探索机器人如…
Read more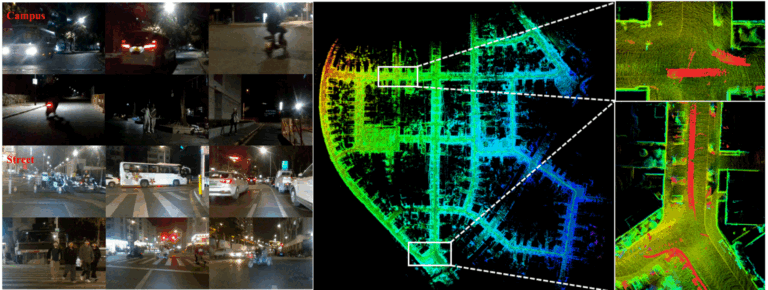
Autonomous Robots2025: DynaLOAM: Robust LiDAR Odometry and Mapping in Dynamic Environments
【图/文 王煜】本工作提出了DynaLOAM,一种面向动态环境的激光雷达SLAM框架,旨在解决动态环境下激光S…
Read more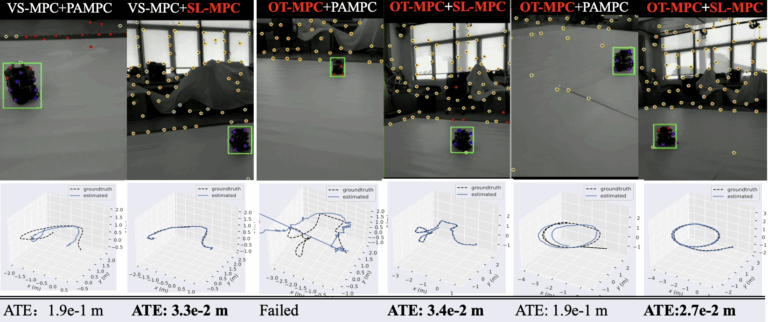
RA-L2025: SLOT-MPC: a Hierarchical Whole-body Model Predictive Controller to Enhance Localization and Object Tracking for UAVs
【图/文 华政宇】本工作提出了SLOT-MPC——一种面向多旋翼无人机系统的分层模型预测控制框架,旨在降低自身…
Read more
祝贺NROS-Lab2025届本科生陈昆同学获得哈尔滨工业大学优秀本科毕业论文
论文题目:复杂环境下异构多机器人的协同自主探索 主要的贡献点:1. 采用八叉树的地图表征框架,通过点云统计属性…
Read more
T-RO 2025: Real-Time Multi-Level Terrain-Aware Path Planning for Ground Mobile Robots in Large-Scale Rough Terrains
【图/文 李宇翔】该工作面向大范围复杂地形的地面移动机器人导航任务,设计了一种多层级地形感知路径规划框架。如图…
Read more