【图/文 华政宇】本工作提出了SLOT-MPC——一种面向多旋翼无人机系统的分层模型预测控制框架,旨在降低自身运动与移动目标估计的不确定性,从而提升同步定位与目标追踪(SLOT, Simultaneous Localization and Object Tracking)性能。
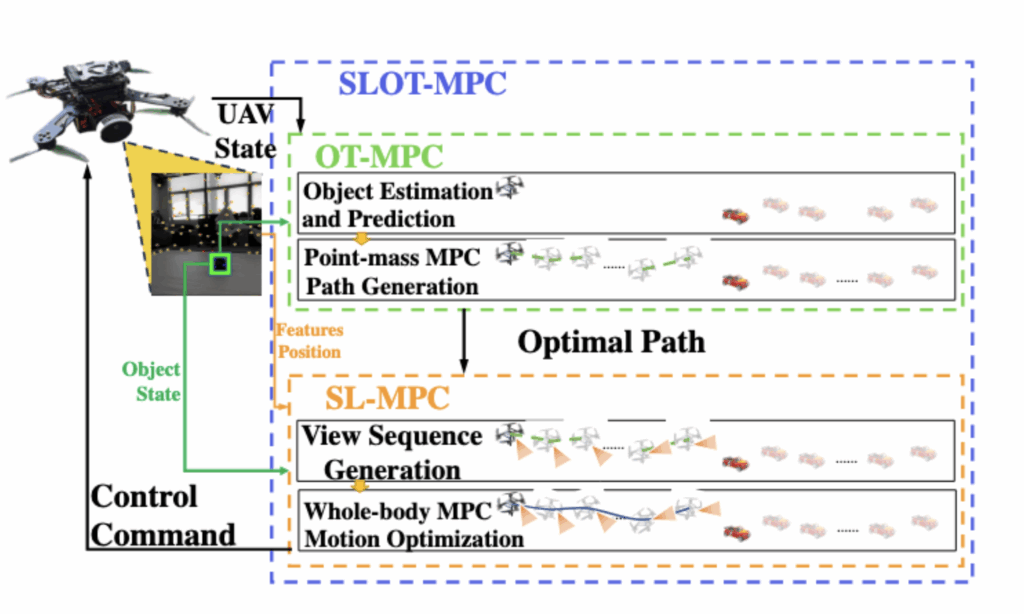
该框架包含两层结构:用于上层路径规划的目标跟踪模型预测控制器(OT-MPC),以及用于路径跟踪和视角控制的自定位whole-body模型预测控制器(SL-MPC)。OT-MPC采用质点模型及时间连续信息滤波器(Time-continous Information Filter),以最小化目标估计不确定性,并通过滚动时域方式在线计算最优追踪路径。进而,为提升基于视觉的自身定位能力,SL-MPC控制器在跟踪OT-MPC生成路径的同时,优化感知目标并利用观测特征提升视觉定位精度,并实时生成飞行器最优控制序列。
主要贡献:
- OT-MPC: 一种将信息滤波器整合进MPC框架的创新方法,利用MPC的预测能力优化目标跟踪任务中的估计精度。
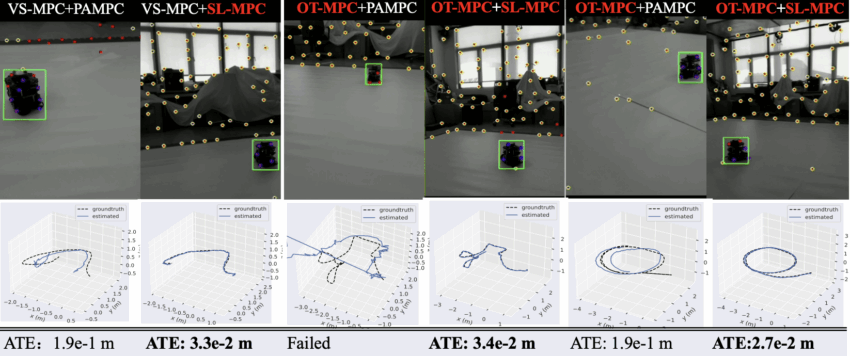
- SL-MPC: 一种基于采样的视角规划算法,旨在保障视觉定位精度和目标可见性,进而引入一个整体非线性模型预测控制器(NMPC)进行运动优化与控制。与传统MPC不同,该方法创新性地采用了一种融入环境感知的采样-优化结构。此结构能避免陷入局部最优,并无需求解复杂的最优控制问题(OCP)。在低纹理环境中,该创新结构显著地将视觉定位精度提升超过50%,有效规避了定位失效风险。
- SLOT-MPC: 一个系统性、灵活且高效的分层整体运动规划与控制框架,融合了上述两个模块。该框架可同步提升无人机的自我定位和目标估计能力。其双层设计充分保障了目标跟踪的优先性,并有效规避了局部最优陷阱。实验表明,该方法可使目标位置估计误差降低50%以上,同时将无人机本体视觉定位精度提升80%以上。