论文题目:复杂环境下异构多机器人的协同自主探索
主要的贡献点:
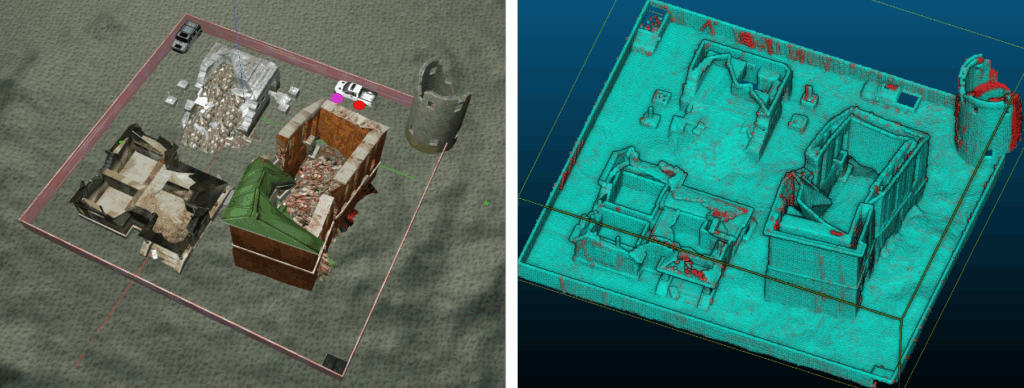
1. 采用八叉树的地图表征框架,通过点云统计属性量化地形可通行度,并引入非完整表面,为路径规划提供结构化先验信息。
2. 改进超体素分割算法,在下采样过程中有效抑制墙体错误分割现象,保留了地形的边界几何语义,降低了内存占用。
3. 设计分层视图提取体系,结合非完整表面引导与异构系统能力量化模型,将视图分配转化为优化问题,优化视图任务紧凑度与均衡性,提高了异构多机器人的探索效率。
4. 设计分层路线规划算法,有效缩减了路径长度并在Gazebo仿真环境中验证了自主探索框架的鲁棒性与高效性。