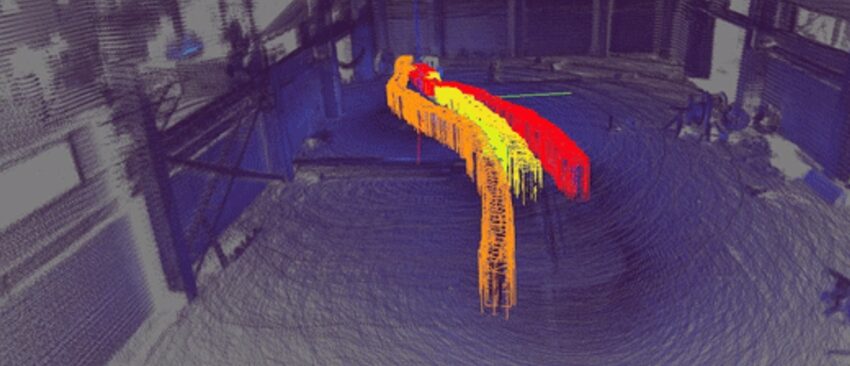
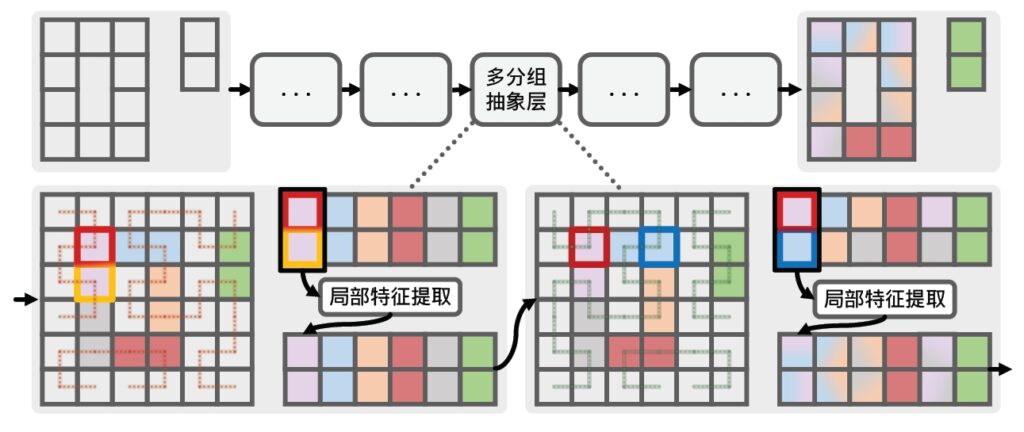
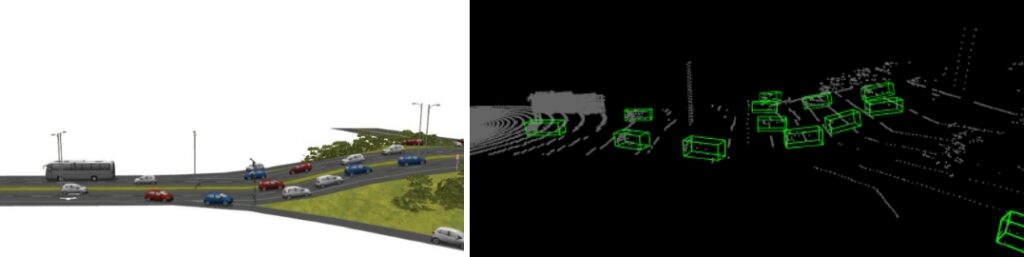
祝贺NROS-Lab2023届硕士欧阳俊源同学获得哈尔滨工业大学优秀硕士毕业论文 Posted on 2024-03-222024-03-23 论文题目: 面向灾害救援机器人的实时三维目标检测。主要的贡献点: 针对点云学习模型中二次复杂度的下采样与近邻查询算法进行算优化,首次实现纯点法检测在大规模点云上实时运行。 设计了基于希尔伯特空间填充曲线的新点云分析范式,避免了常规体素法点云分析范式使用稀疏卷积而难以部署的问题。 设计了全自由度的三维目标检测器,用于缓解现有基于平面假设的三维目标检测器无法用于户外崎岖场景的问题。