
【图/文 闫栋宇、刘健恒】在该工作中,我们创新性地将神经隐式三维表达与主动重建进行了有机结合,提出了一种基于最佳视图(NBV, Next-Best-View)的主动隐式重建算法。我们通过构建一个隐式占据度场作为整个场景的几何表达,利用物体包围框的先验信息,使用体渲染的方式进行场景的训练。为了评估视图不确定性,我们采用基于采样的方法,直接从重建的占用概率场中提取熵作为视图信息增益的度量, 这消除了对额外的不确定性图或学习的需要。 与之前比较有限候选集合内的视图不确定性的方法不同,我们的目标是在连续流形上找到下一个NBV。 利用隐式表示的可微性,可以通过使用梯度下降最大化视图不确定性来直接优化 NBV。 它显着增强了该方法对不同场景的适应性。

图1 主动隐式重建技术框架图
本工作的贡献包括,我们通过构建统一的占用概率图并使用基于采样的方法进行不确定性评估,将主动视图规划与隐式重建相结合。 我们的方法通过用有限的测量找到更多信息的视图,显着提高了基线方法的重建完整性;我们在连续流形上提出了一种新颖的基于优化的 NBV 规划,与传统的有限候选视图集相比,在适应性方面表现出优越的性能;我们消除了与其他隐式方法相关的额外预处理和后处理步骤,从而实现了完全自主的重建过程;同时我们的方法具有实时能力,可以应用于现实世界的机器人平台。
在实验中,我们使用本方法与传统重建方法以及其他的主动重建策略进行了对比。得益于使用隐式表达以及相关监督策略,我们提出的方法不仅在重建精度上优于传统三维重建方法,所提出的基于优化的视角选择也使得重建效率以及完整度更优。我们在仿真环境以及真实场景中进行了定性以及定量实验。
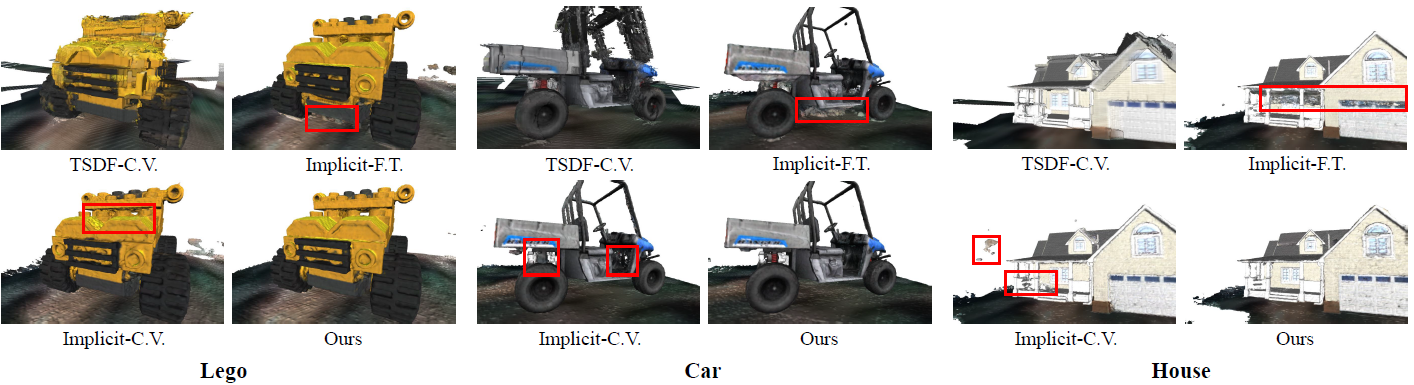
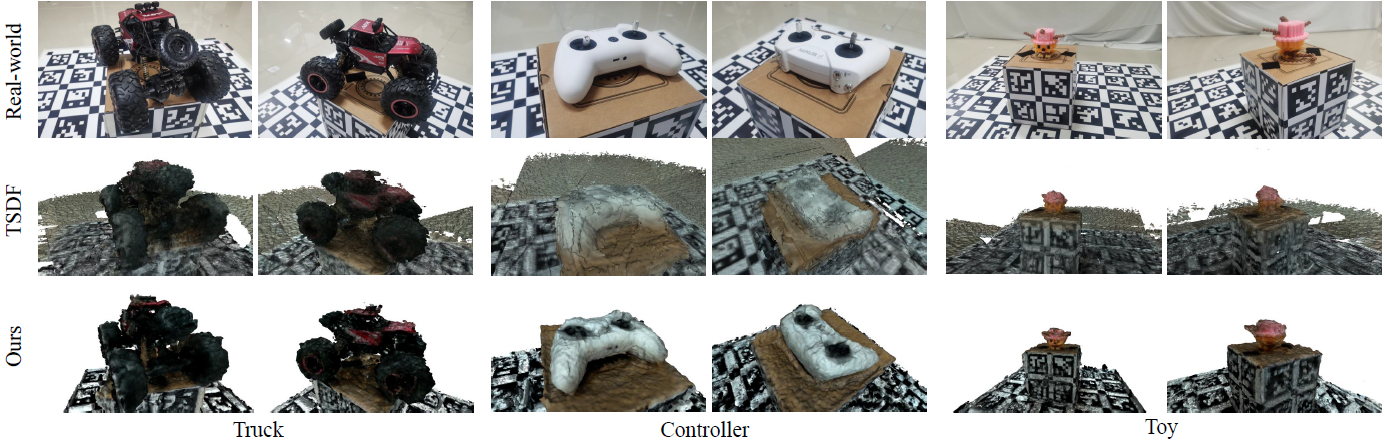
图2 主动隐式重建实验结果
为了能够进行主动重建实物实验,我们搭建了无人机实验平台,其主体采取四旋翼作为动力,搭载一个深度相机作为传感器,使用舵机控制相机进行偏转以获得五自由度的视角规划。

图3 实验搭建无人机平台
本工作代码已开源,项目地址为:
https://github.com/HITSZ-NRSL/ActiveImplicitRecon.git
论文引用为:
Dongyu Yan, Jianheng Liu, Fengyu Quan, Haoyao Chen*, Mengmeng Fu, “Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization”, IEEE Robotics and Automation Letters, accepted, 2023. https://doi.org/10.1109/LRA.2023.3306282