经过激烈的竞争,NROS实验室2020级硕士(2022届毕业)王巨同学凭借其毕业论文《障碍空间下旋翼飞行机械臂快速抓取研究》获得哈尔滨工业大学优秀硕士学位论文。该问题摘要如下:
旋翼飞行机械臂是指旋翼无人机上加装多自由度轻量机械臂的特殊系统,由于具备与环境交互的能力,在接触式检修、复杂地形的物流运输等大量场景中具备应用潜力。避障能力以及快速抓取能力,是旋翼飞行机械臂系统未来在实际应用中不可或缺的基础功能。针对检修、运输等任务对避障以及抓取效率的需求,本文以静态的障碍物空间中的抓取任务为切入点,在建模分析系统运动学与动力学的基础上,提出了适用于旋翼飞行机械臂的规划算法与相配套的控制算法,并在仿真场景与实际的实验场景中对算法的有效性进行了验证。
旋翼飞行机械臂由于其自身结构的问题,无人机平台的运动与机械臂的运动相互耦合,这给系统整体的规划和控制带来了严重挑战,而考虑系统质心运动的建模方式是解决这种耦合特性一种可行方式。本文在基于质心运动建立运动学与动力学模型的基础上,首先根据实际抓取任务的需要,建立旋翼飞行机械臂的全局逆运动学优化问题。为了得到一组可行的质心位置与机械臂关节角度,本文用凸约束对非凸约束进行近似,构建了混合整数的二次约束二次优化问题并进行求解。
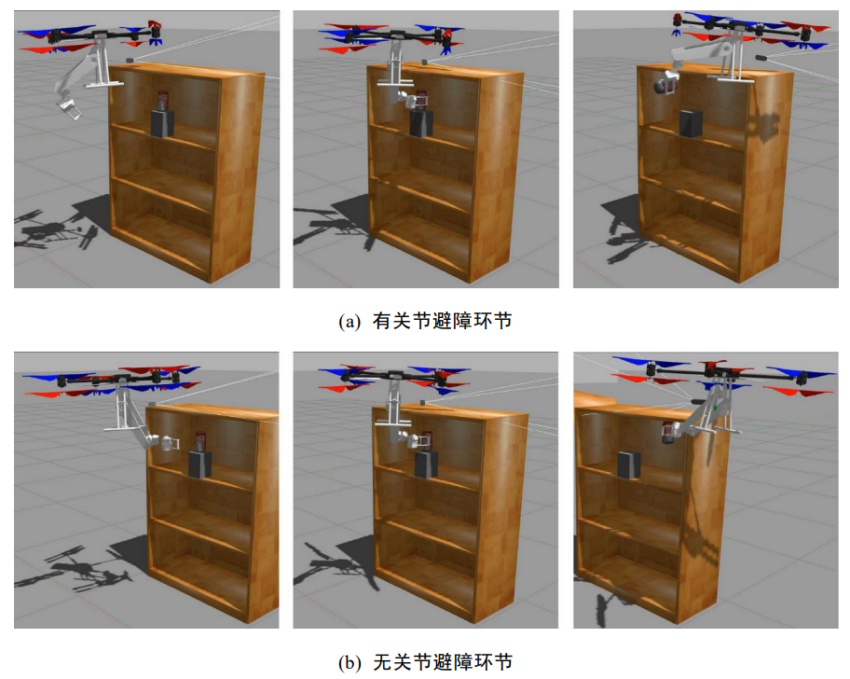
基于全局逆运动学的解,本文进一步设计了旋翼飞行机械臂的运动规划算法,包含两部分,质心规划与关节规划。在质心规划的阶段,主要考虑的是无人机平台的避障问题,通过二次优化的方式得到分段高阶连续的多项式轨迹。而机械臂各关节的避障则在关节规划阶段考虑,本文主要采用了人工势场法的思想实现机械臂各关节的避障,最后通过对各个关节的关节角进行曲线拟合,得到每个关节的轨迹。
在得到系统的质心和各个关节的轨迹之后,需要进一步对轨迹进行跟踪控制以完成抓取任务。但是,传统旋翼无人机的飞行控制器并不能很好的实现对系统质心的跟踪控制,因此本文提出了一种新的控制架构,通过自定义的质心控制器并结合无人机姿态环的控制器,实现了对质心轨迹的跟踪。为了跟踪关节轨迹,本文通过自适应抗扰动的控制算法实现了对机械臂整体的控制。
本文在基于物理引擎的仿真系统以及实物系统上,分别都对算法进行了测试,验证了其有效性。本文从规划和控制这两个层面提出了一套能够实现旋翼飞行机械臂避障与快速抓取的算法,使得系统可以应对存在静态障碍物的一般环境,同时发挥出较高的机动性。