【图文 刘健恒】nROS-Lab近期开放与华为合作的最新成果Dynamic-VINS,期待感兴趣的研究与开发人员共同改进这一算法。Dynamic-VINS是一个面向动态环境下资源受限机器人的RGB-D惯性里程计,为低成本机器人在动态环境下提供动实时的位姿反馈。
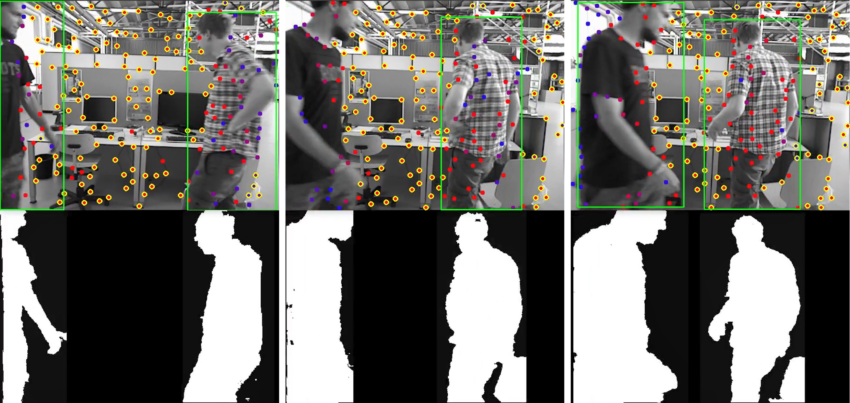
利用目标检测和深度信息进行高效的动态特征识别,并辅以漏检补偿,效果可媲美语义分割。
基于分块网格的特征提取以及高效高质的FAST特征提取。
在华为Atlas200 DK、NVIDIA Jetson AGX Xavier等资源受限的边缘计算设备上展示了其在动态环境下优秀的定位精度和鲁棒性。
相关论文:
Jianheng Liu, Xuanfu Li, Yueqian Liu and Haoyao Chen, “RGB-D Inertial Odometry for a Resource restricted Robot in Dynamic Environments”, IEEE Robotics and Automation Letters, 2022