Abstract: Industrial micro aerial vehicles (MAVs) with robotic manipulators have numerous applications in search and rescue tasks that reduce risks to human beings. However, such tasks
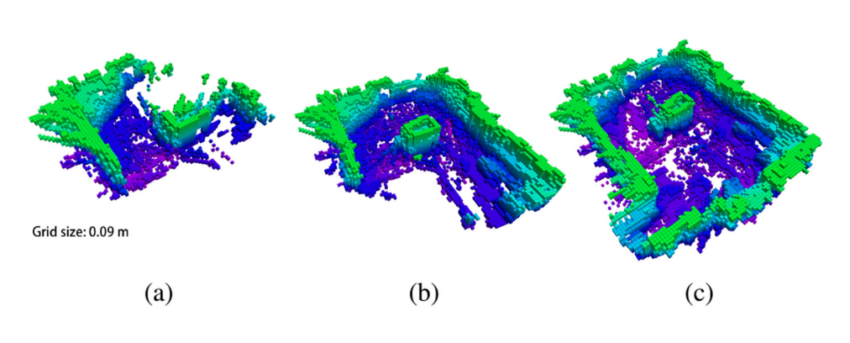
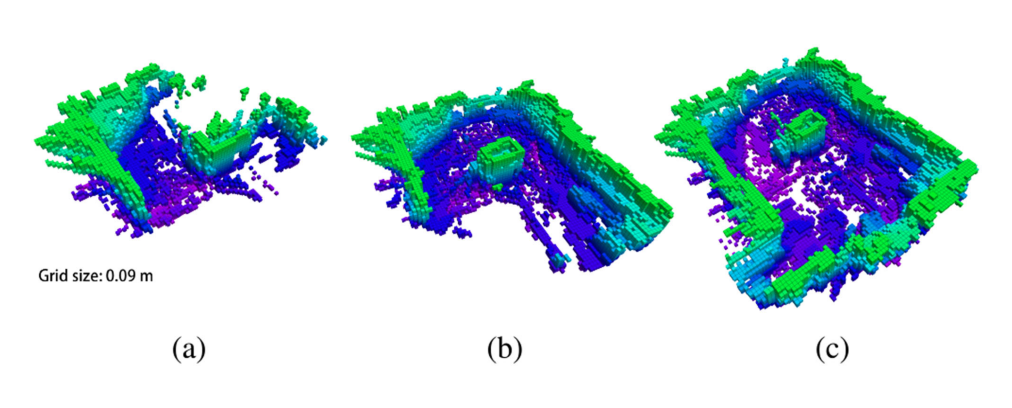
distinctly require MAVs to have the capability of real-time autonomous navigation only with onboard sensors, especially in GPSdenied applications. This study introduces a new approach to onboard vision-based autonomous state estimation and mapping for MAVs’ navigation in unknown environments. The algorithms run on board and do not need an external positioning system to assist autonomous navigation. The state estimator is developed to provide MAV’s current pose on the basis of the extended Kalman Filter by using image patch features. Inverse depth convergence monitoring and local bundle adjustment are utilized to improve the accuracy. The mapping algorithm for navigation is developed according to a real-time stereo matching method for 3D perception. Finally, we performed several experiments to demonstrate the effectiveness of the proposed approach.
Jiabi Sun, Jing Song, Haoyao Chen*, and Yunhui Liu, Autonomous State Estimation and Mapping in Unknown Environments with Onboard Stereo Camera for MAVs, IEEE Transactions on Industrial Informatics, 16(9), 2020:5746-5756. https://doi.org/10.1109/TII.2019.2958183 (SCI:7.377) [bibtex]