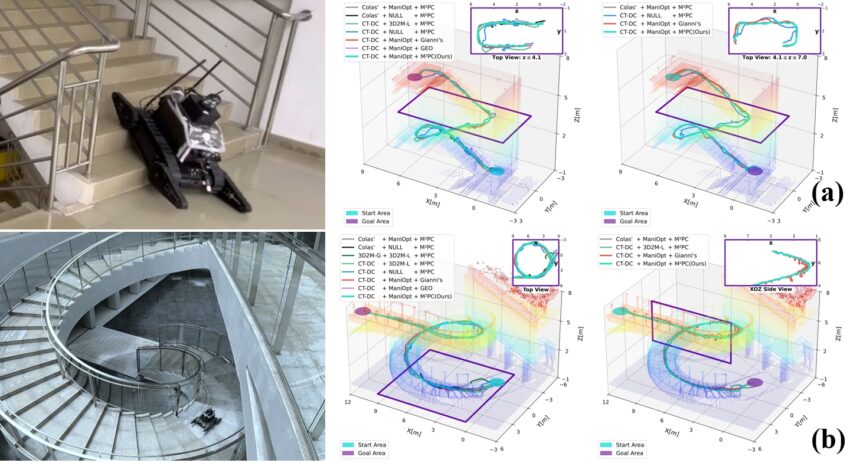
【图/文 王逸飞】关节式履带机器人(Articulated Tracked Robots, ATRs)非常适用于救援任务,但在包含多楼层结构、大幅高差以及崎岖地形的大规模三维救援场景中,其导航仍面临显著挑战。首先,可通行区域之间(如坍塌楼层之间的楼梯结构)通常呈现稀疏且复杂的拓扑连通性,严重降低了导航效率。其次,由于ATR拥有较多的运动自由度,且其形心状态定义于三维空间SE(3)中。因此,传统二维平面导航方法难以有效应对如此高维、复杂的导航问题。此外,机器人的可通行性高度依赖于ATR自身的构型与地形之间的耦合关系,使得规划过程更加复杂。进一步地,陡坡、楼梯等特殊地形特征对机器人的机动策略提出更高要求,导航必须充分利用地形信息来对地形的可通过性进行细致评估,以确保安全。现有研究主要利用简单的跟踪控制来实现ATR在复杂地形中的机动。但这样的控制手段在ATR这种多输入-多输出的复杂系统上的表现存在明显缺陷,也很难在满足机器人约束的情况下实现全身协调机动,并使机器人安全地完成路径跟踪。
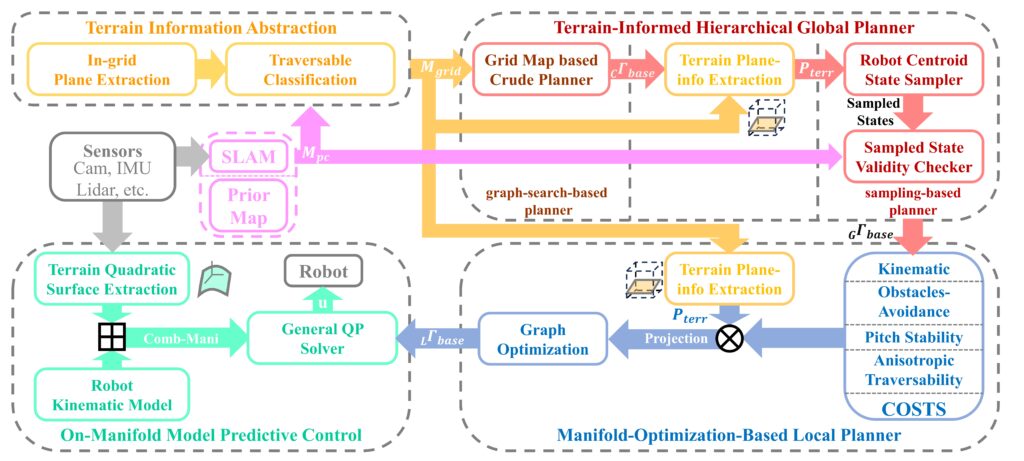
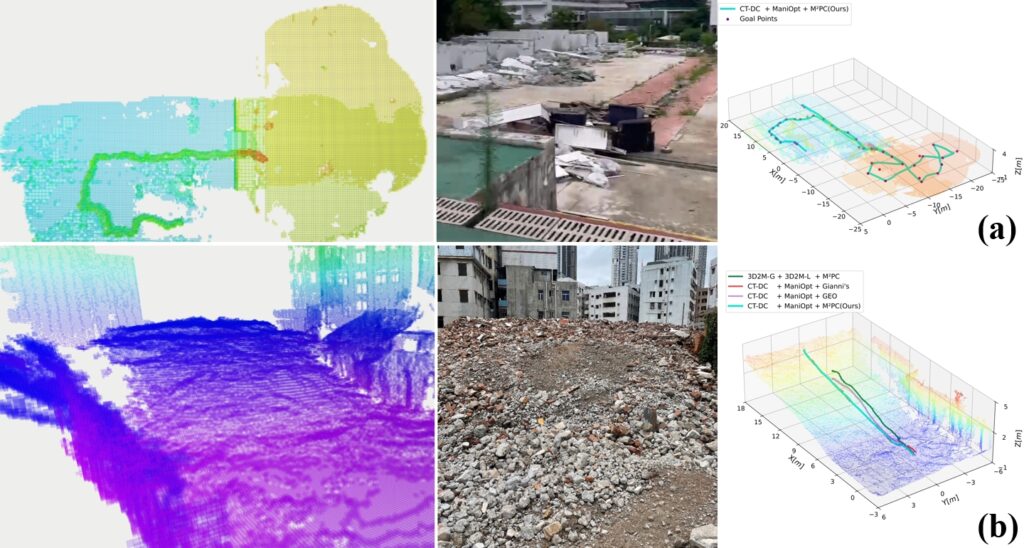
为了应对前面提出的问题和挑战,本文提出了一种在各个阶段充分利用地形信息的ATR导航框架。首先,基于离散化地形地图的分层全局规划器能够快速生成可行的形心路径,在保证可达性的前提下显著提升大规模三维环境中的规划效率。接着,本文提出了基于流形优化的局部路径规划器,使得优化出的避障路径在满足运动学约束和机体稳定性的前提下,可以针对场景中特殊的可通行区域调整相应的导航策略,从而增强机器人在复杂地形中的安全性与适应性。最后,基于流形模型预测控制器的全身协调控制策略仅依赖局部形心路径与局部地形感知信息,实现了底盘与辅助鳍臂的实时协同控制,从而避免了高维规划需求,进而保证机器人在崎岖地形上的机动能力和稳定性。通过模块间的紧密协作,该框架实现了导航流程的解耦,并在完备性与最优性之间取得良好平衡,同时兼顾了计算效率与系统鲁棒性。
论文引用:Yifei Wang, Weifan Zhang, Yuxiang Li, Jiancheng Wang, Haoyao Chen*. TiFA: A Terrain-informed Navigation Framework for Articulated Tracked Robots in Rescue Missions, International Journal of Robotics Research, online, 2025, doi: 10.1177/02783649251403077.