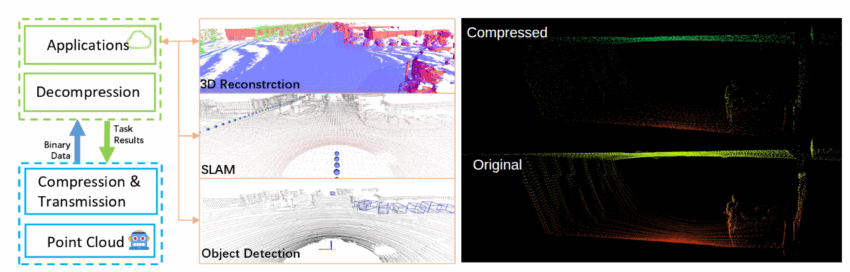
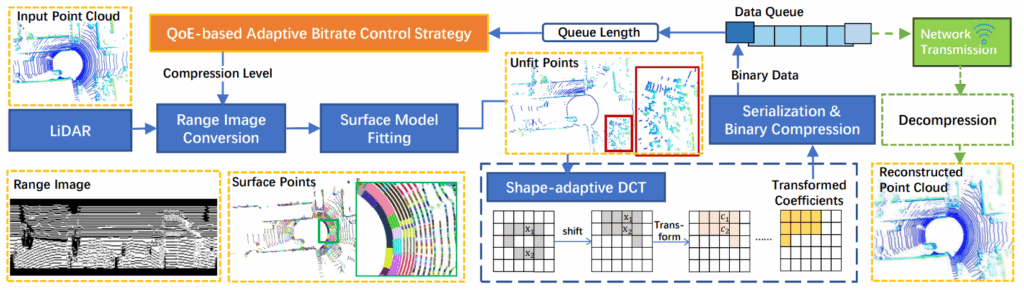
【图/文 曹宇豪】激光雷达因其能够提供精确的环境结构信息而被广泛应用于自主机器人。然而,点云数据量巨大,给数据存储和传输带来了挑战。本文提出了一种适用于资源受限机器人应用的新型点云压缩与传输框架 RCPCC。我们迭代拟合具有相似距离值的点云表面,并通过点云的空间关系消除冗余。然后,我们使用形状自适应离散余弦变换 (SA-DCT) 对不拟合的点进行变换,并通过量化变换系数来减少数据量。我们设计了一种基于用户体验质量 (QoE) 的自适应码率控制策略,以控制传输点云的质量。实验表明,我们的框架在保持高精度的同时,实现了 40 倍到 80 倍的压缩率,以满足下游应用的需求。当压缩率超过 70 倍时,我们的方法在精度方面显著优于其他基准方法。此外,在通信带宽受限的情况下,我们的自适应码率控制策略也展现出显著的用户体验质量 (QoE) 提升。
视频链接如下:
https://www.bilibili.com/video/BV1XrZHYqEBE/?share_source=copy_web&vd_source=1491dbba13fe03177c5a2ef4db8fee15
代码链接如下:
https://github.com/HITSZ-NRSL/RCPCC
文献引用:
Cao, Yuhao, Yu Wang, and Haoyao Chen. “Real-Time LiDAR Point Cloud Compression and Transmission for Resource-constrained Robots.” 2025 International Conference on Robotics and Automation (ICRA). IEEE, 2025.