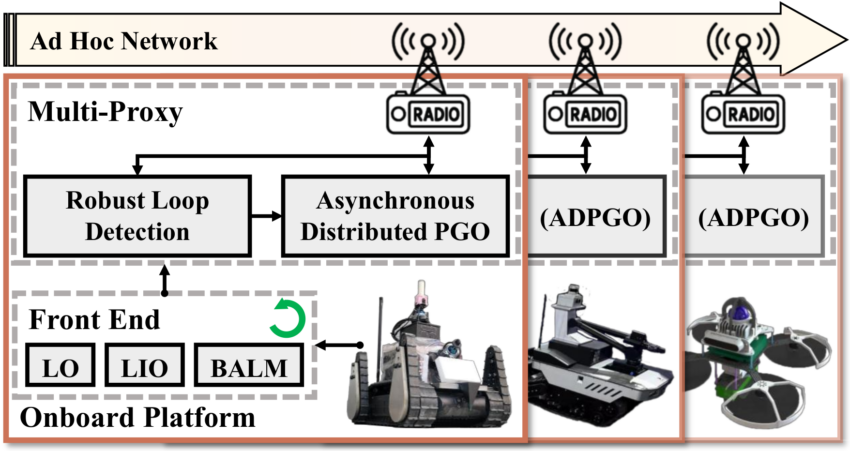
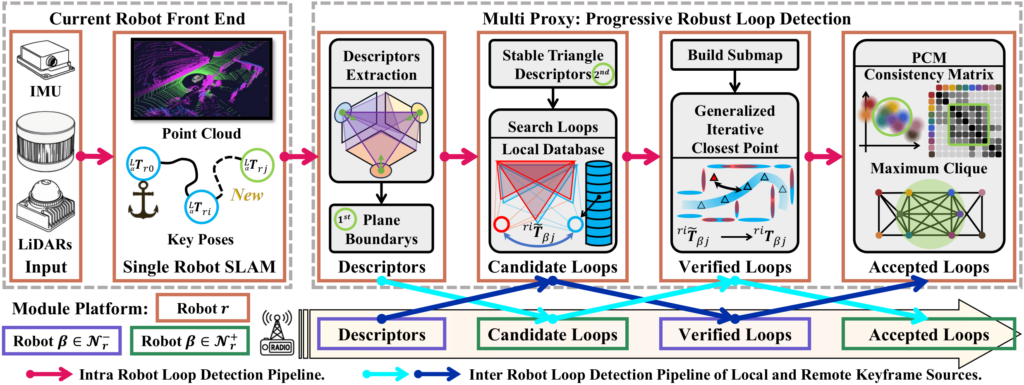
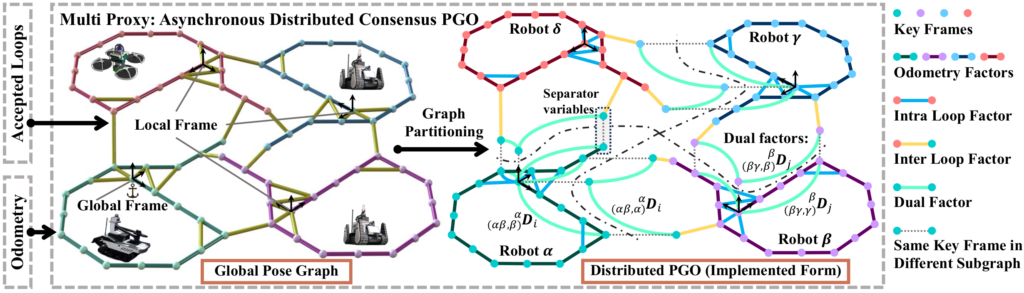
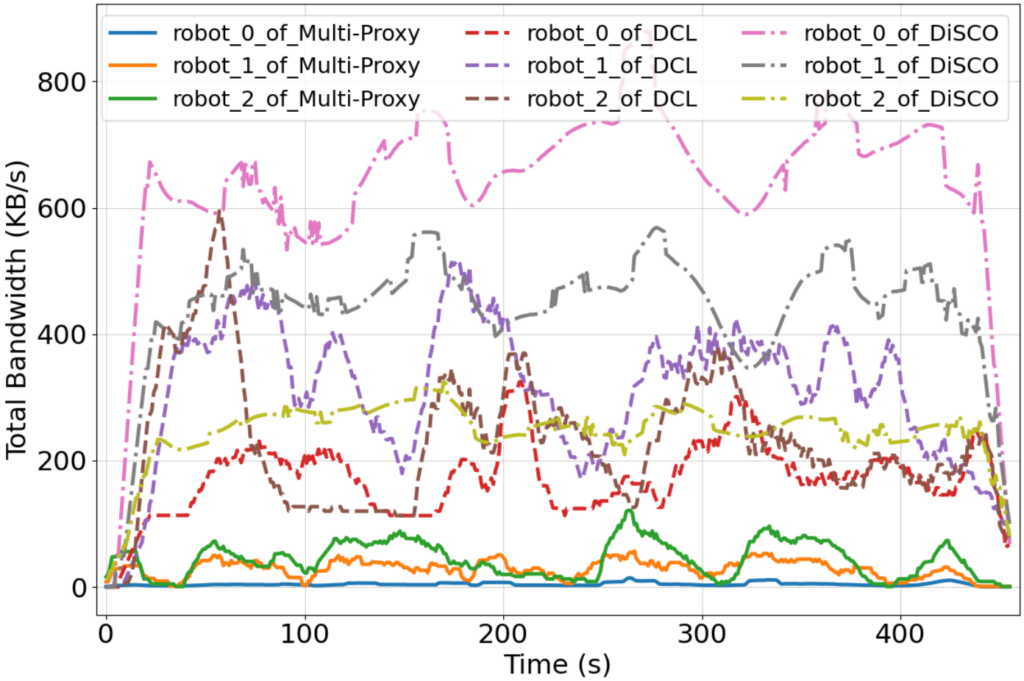
【图/文 王健丞】在大规模、复杂且受通信约束的环境中,高效的多机器人协作对同步定位与建图(SLAM)系统提出了严格要求。现有的协作式激光雷达 SLAM(C-LSLAM)方法尽管能实现高精度定位,但依赖高带宽、低延迟的通信,这限制了其实时性能、可靠性与可扩展性。我们提出了 Multi-Proxy,一种异步、分布式且去中心化的 C-LSLAM 框架,采用渐进式回环闭合检测策略。所设计的轻量级描述子在大视角变化下仍能保持丰富的协作约束,从而显著减少机器人间通信开销。不同于传统的同步分布式优化,Multi-Proxy 的后端采用异步交替方向乘子法(ADMM),实现了高效的异步分布式位姿图优化(ADPGO),无需等待同步估计,从而在出现通信丢包或高延迟时仍能保证稳健的实时性能。作为一个协作定位插件,Multi-Proxy 可无缝集成到现有的 C-LSLAM 系统中,提升系统的灵活性与可扩展性。实验结果表明,Multi-Proxy 在绝对轨迹误差(ATE)、平均地图熵(MME)、平均 Wasserstein 距离(AWD)和 Chamfer 距离(CD)等指标上均优于最先进(SOTA)的 C-LSLAM 方法,同时将通信带宽降低了超过 80%。
主要贡献:
- Muli-Proxy 框架可灵活兼容现有LSLAM 系统,避免异构前端适配与时钟同步问题;其低通信负载与分布式存储计算架构进一步增强了系统的可扩展性;
- 提出了一种基于分布式渐进配准的多机器人 LiDAR 回环检测算法,该算法在大范围场景下显著提升回环检测的准确性与鲁棒性,并利用轻量化描述子,有效减少机器人间匹配时的带宽开销;
- 设计了异步分布式多机器人因子图优化后端,可在无需等待其他机器人最新状态估计的前提下,保证黎曼流形上优化结果的全局一致性,从而提升系统在通信延迟和丢包等异常情况下的效率与鲁棒性;
- 通过公开数据集和机载实验验证了所提 C-LSLAM 系统具有高精度、高通信鲁棒性和低带宽;同时,本文将公开系统源代码,促进后续研究与应用。
论文引用为:
Jiancheng Wang, Chenyuan Cai, Jinqian Tan and Haoyao Chen*, “Communication-Robust Asynchronous Distributed LiDAR Collaborative Smoothing and Mapping”, IEEE Robotics and Automation Letters, January, 2026.