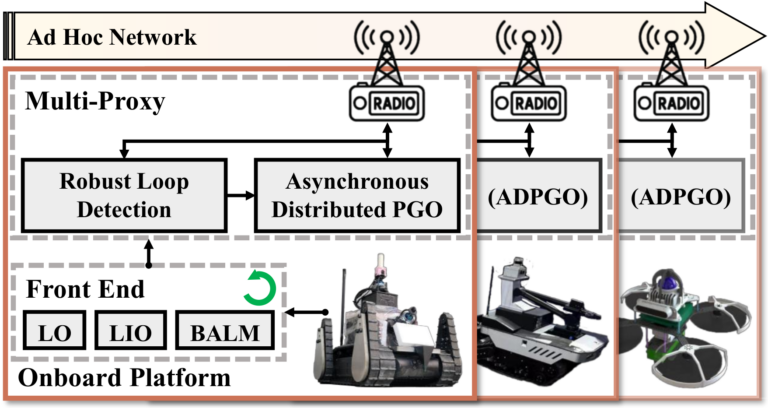
RA-L 2026: Communication-Robust Asynchronous Distributed LiDAR Collaborative Smoothing and Mapping Posted on 2026-01-132026-01-14 【图/文 王健丞】在大规模、复杂且受通信约束的环境中,高效的多机器人协作对同步定位与建图(SLAM)系统提出了… Read more