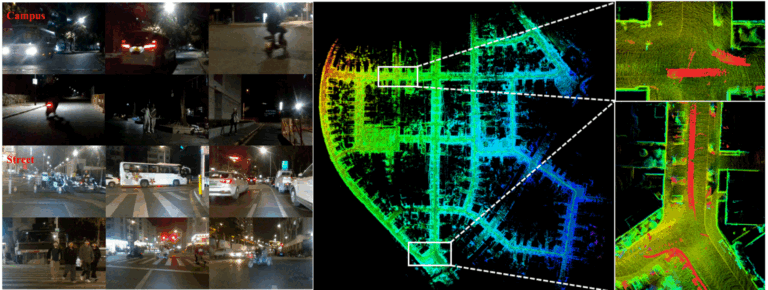
Autonomous Robots2025: DynaLOAM: Robust LiDAR Odometry and Mapping in Dynamic Environments Posted on 2025-09-082025-09-11 【图/文 王煜】本工作提出了DynaLOAM,一种面向动态环境的激光雷达SLAM框架,旨在解决动态环境下激光S… Read more