
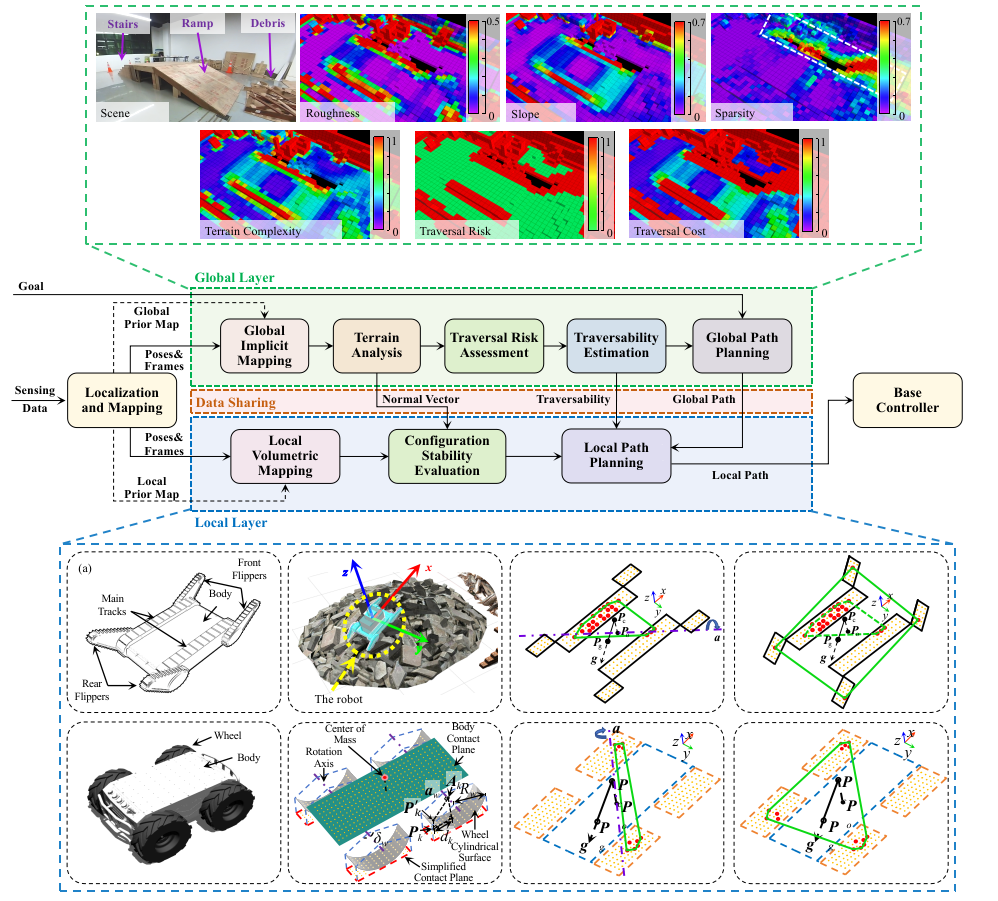
【图/文 李宇翔】该工作面向大范围复杂地形的地面移动机器人导航任务,设计了一种多层级地形感知路径规划框架。如图1所示,本文在全局层和局部层分别引入不同程度的地形感知。在全局层引入隐式地图用于全局层的地形分析,以较低分辨率的体素记录亚分辨率级的几何地形特征,有助于快速全局可行驶路径规划。在局部层结合机器人模型,设计了通用的几何迭代法估计机器人在三维地形上的稳定性,用于规划出平滑、安全的局部路径。该框架有机结合地形分析和构型稳定性估计的优势,同时改进了全局和局部规划之间的信息共享和耦合程度,提高了路径规划的效率和成功率。通过模块化设计以兼容不同构型的机器人,并支持多种路径搜索器。实现了高效、可靠的三维地形环境的地面移动机器人路径规划,例如粗糙的大范围户外地形、多层结构建筑和更复杂的废墟地形。
主要贡献:
- 首先,提出了基于隐式地图的地形属性建模方法,及该地形表示下的地形指标计算方法,使得地形指标具备亚体素级的准确度,同时保证了地形属性更新的高效性。并基于地形指标设计了地形分析、通行风险评估和可通行度地图构建方法,促进了大范围的崎岖地形路径规划。地形分析效率是传统体素地图方法的8.3~13.5倍,全局规划规划效率是SOTA方法的3.4~8.9倍。
- 其次,在局部层针对地面移动机器人构型特点,设计了迭代几何方法估计机器人在三维地形上的稳定性,模拟底盘下落到接触地面的过程,通过精细设计的模型抽象和迭代评估过程,提高了三维地形下构型稳定性估计的有效性和计算效率,进而规划出平滑、安全的局部路径,确保了复杂地形的穿越成功率。实测复杂地形穿越成功率达到了SOTA方法的1.3~2.1倍。
- 该框架有机结合地形分析和构型稳定性估计的优势,同时改进了全局和局部规划之间的信息共享和耦合程度,提高了路径规划的效率和成功率。通过模块化设计以兼容不同构型的机器人,并支持多种路径搜索器。实现了高效、可靠的三维地形环境的地面移动机器人路径规划,例如粗糙的大范围户外地形、多层结构建筑和更复杂的废墟地形。支持在线、离线地图更新方式,实测在线建图体积可达1,360m³,离线地图加载体积可达400,000m³。
论文引用为:
Yuxiang Li, Kun Chen, Yifei Wang, Weifan Zhang, Jiancheng Wang, Haoyao Chen*, and Yunhui Liu, “Real-Time Multi-Level Terrain-Aware Path Planning for Ground Mobile Robots in Large-Scale Rough Terrains”, IEEE Transactions on Robotics, online, 2025.