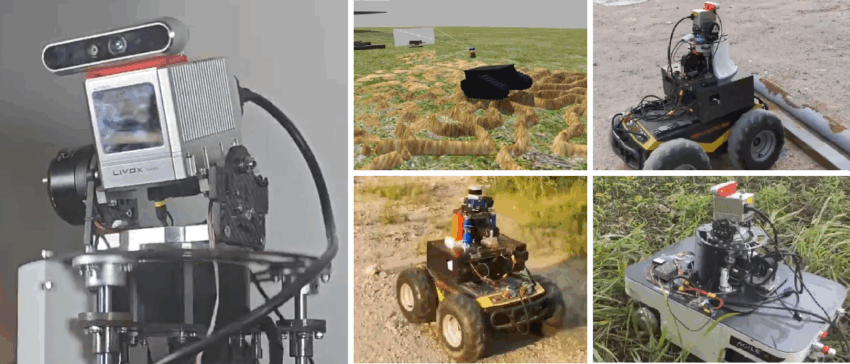
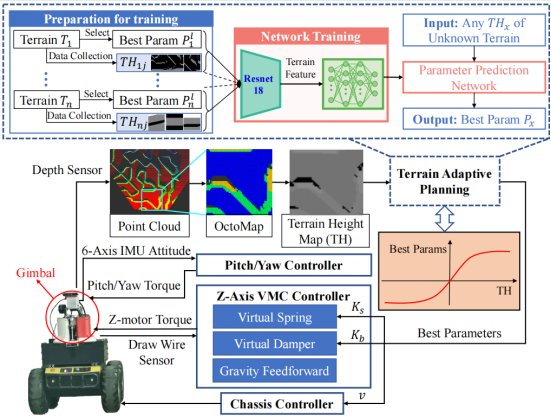
【图/文 王志濠、李鸣航】机器人或汽车在平坦地形或城市环境中的同步定位与地图构建 (SLAM) 已由成熟的解决方案成功解决。然而,在崎岖地形或越野环境中导航对 SLAM 提出了严峻挑战,因为地形会引起高频振动和快速俯仰运动,导致 SLAM 频繁失败。为了应对这一挑战,我们引入了一种混合多轴云台系统,该系统配备了旋转机构(俯仰和偏航)和平移机构(Z 轴)。我们的方法包括使用虚拟模型控制VMC算法模拟虚拟悬架系统,从而实现精确的 Z 轴稳定控制。这一关键步骤确保了即使在崎岖地形下传感器也能保持稳定性。此外,我们提出了一种地形自适应规划算法来调整机器人的云台参数和移动速度,从而确保在不同地形条件下传感器数据的质量。具体而言,我们建立了云台系统的动力学方程,并建立了耦合优化问题以选择最优云台控制参数和移动速度。为了高效准确地解决这一优化问题,我们提出了一个数据驱动的参数预测网络。该网络分析感知到的地形数据,然后根据不同的地形自动调整机器人的虚拟悬架参数和移动速度,确保在所有地形上都能保证传感器的数据质量。最后,通过仿真和实验验证了所设计的云台系统和所提出的地形自适应规划算法所取得的改进,包括传感器稳定性的增强以及在崎岖地形下SLAM鲁棒性和精度的提升。
视频链接如下:
https://www.bilibili.com/video/BV1EiVhzTEyE
代码链接如下:
https://github.com/HITSZ-NRSL/Adaptive_Gimbal
文献引用:Zhihao Wang, Minghang Li, Xiao Liu, Yu Wang, Yiming Liu and Haoyao Chen*, “Terrain-Adaptive Planning of a Mobile Robot with a Multi-Axis Gimbal System for Stable SLAM”, IEEE Transactions on Field Robotics, accepted, 2025.