【图/文 王思强】该工作面向无人机携带悬挂载荷的负载运输需求,设计了一种结合自适应状态估计器和轨迹跟踪控制器的新型算法。如图1 所示,该工作的优势是使用自适应方法同时估计系统状态和环境特征位置。该工作通过Lyapunov理论证明了系统的渐近收敛性。该工作提出的视觉惯性估计算法在计算消耗方面比基于优化的方法更低,并为执行激进飞行的系统提供了高精度、低延迟的状态估计。在基于ODE的仿真器中设计并进行了多个仿真来验证所提出的方法。还在仿真器中与其他基于视觉惯性的算法进行了比较。仿真结果体现了所提出的算法的收敛性、鲁棒性和高效率。 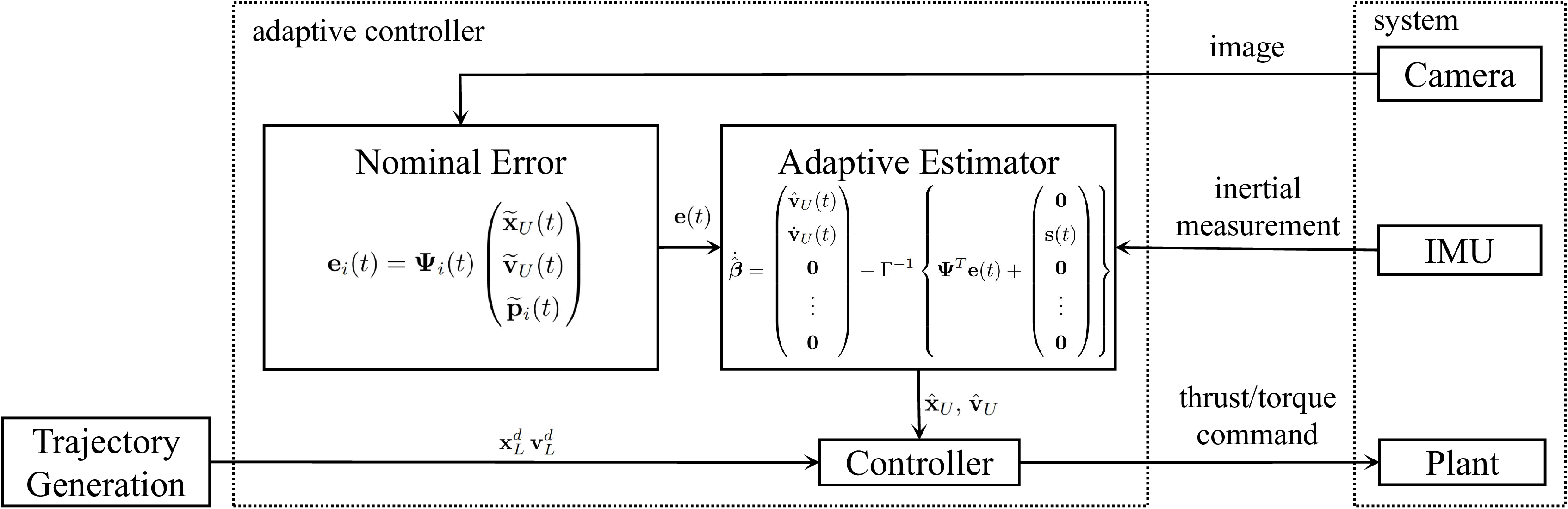
图1 该工作总体框架
主要创新点:首先,该工作提出了一种紧密结合的自适应轨迹跟踪方法,用于无人机携带悬挂负载。这是第一种能够在没有全局定位系统或先验环境地图的情况下同时实现状态估计和跟踪控制的方法。其次,该工作使用Lyapunov理论证明了位置估计和跟踪误差的收敛性。为了避免需要地面真实状态来计算估计误差,该工作引入了一个名义估计误差,并证明名义误差收敛等价于真实估计误差收敛。第三,低延迟的框架支持大范围的激进飞行方式。与VIO方法相比(VINS-Mono为25Hz),该工作提出算法的频率(37Hz)更高。如图2所示,自适应控制器在“穿窗”实验和长距离非重复轨迹跟踪中表现良好。
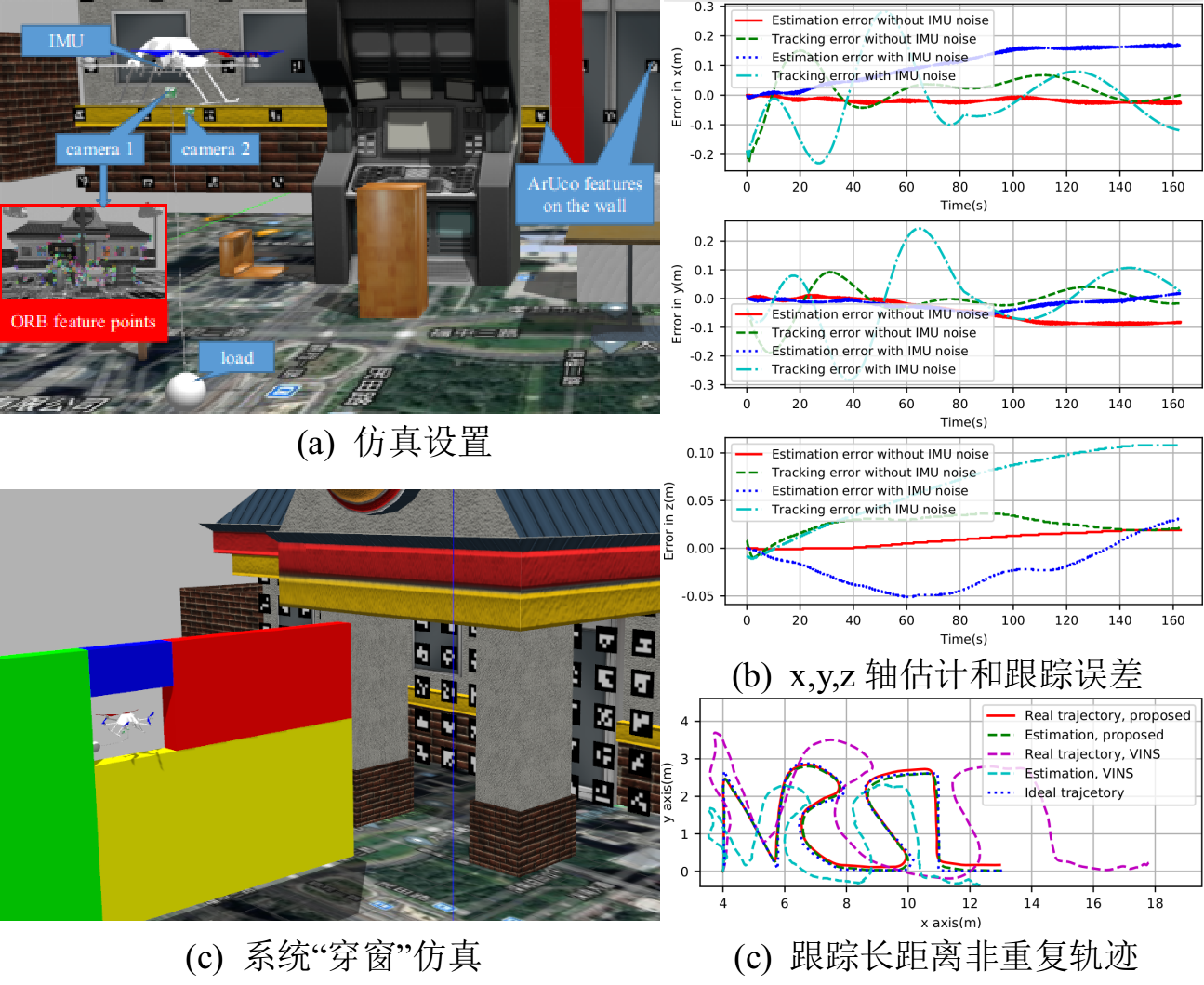
图2 状态估计与轨迹跟踪效果
论文引用:Siqiang Wang, Haoyao Chen*, Jianheng Liu, Yunhui Liu, “Adaptive Trajectory Tracking of UAV with a Cable-Suspended Load Using Vision-Inertial-Based Estimation”, Automatica, 158, 2023.