梁思奇本科毕业论文题目: 基于激光雷达和多分辨率搜索的无人机自主避障与路径规划
贡献点:
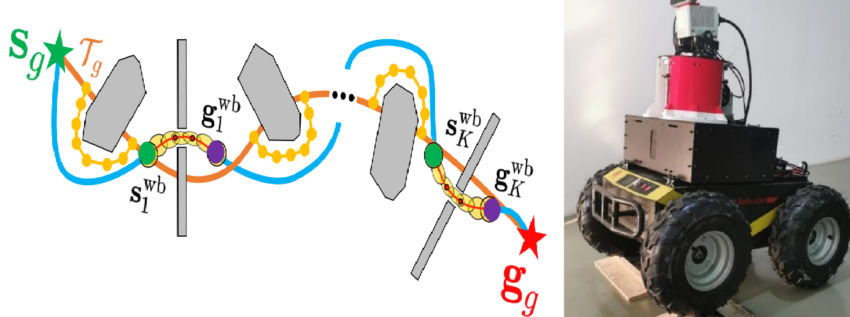
- 设计了多分辨率并行路径搜索方法,根据搜索结果将狭窄程度不同的场景中的轨迹规划问题拆分为位置规划和局部全状态规划,对整体轨迹进行分级求解,减少了计算量。
- 设计了一种狭窄区域飞行走廊生成方法,且与其他方法对比,具有更好的安全空间表述能力,避免了奇异形状走廊导致的优化不收敛,在全状态规划问题中具有更好的应用效果。
- 将规划算法整合进无人机自主导航系统,使用搭载固态激光雷达的四旋翼无人机在仿真与真实环境中进行了广泛的测试,验证了算法的稳定性和高计算效率。
李鸣航本科毕业论文题目:面向机器人主动感知的多自由度云台设计与控制研究
贡献点:
- 通过分析多自由度云台的系统设计参数,计算负载的转动惯量、所需电机力矩等方式选取了合适的执行机构,同时辅以交叉滚子轴承等机械结构的设计以减少环境的干扰;设计了垂直稳定机构,并分析了各部分起到的作用;完成了多自由度云台的加工与装配。
- 为多自由度云台的旋转自由度与垂直自由度分别设计了不同的控制器,对于旋转自由度,采取了ADRC抗干扰的控制器,并通过仿真环境验证了ADRC在面对环境干扰下相比于PID控制算法的优越性与有效性;对于垂直自由度,设计了一种基于柔顺控制思想的虚拟模型控制器,并通过系统传递函数分析的方式对其在面对不同频率干扰情况下的有效性。
- 提出了一种可以应用于移动机器人多自由度云台的地形自适应算法,包含基于IMU数据的地形粗糙度及驾驶模式分类,以及基于SVM分类器与HOG算子的地形粗糙度识别。
- 在基于Gazebo仿真环境与真实世界的基础上进行了多自由度云台与控制器算法的有效性验证、地形自适应算法的有效性验证。