【图/文 李宇翔】代码开源地址为:https://github.com/HITSZ-NRSL/active_mapping_dvc.git
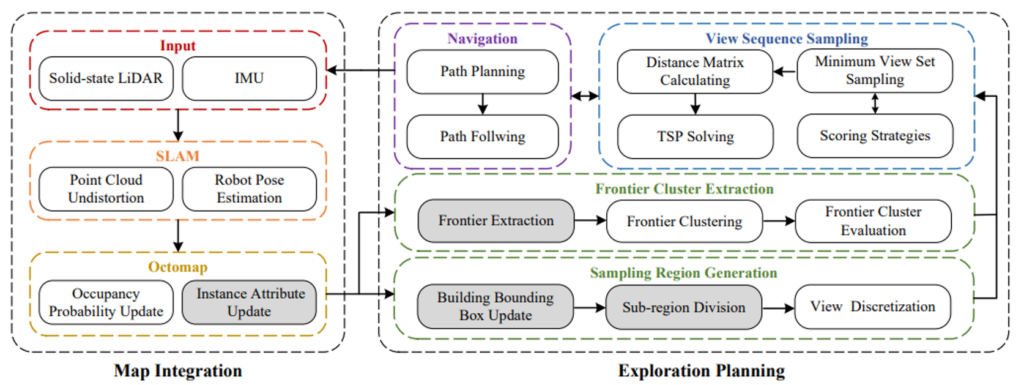
该工作面向户外机器人作业过程中的自主三维重建需求,针对户外三维重建过程中建筑物表面细节丰富、周边环境复杂等因素对重建效率和完整度带来的挑战,完成了一套面向户外建筑物的高效自主重建方案。该方案(如图1所示)包括基于实例属性的物体感知地图表示,基于“分-治”策略的采样区域划分方法,以及结合边界聚类和视图采样的视图规划算法等三个部分。主要创新点:1.提出一种新型的物体感知地图表示方法,将实例属性集成到地图表示中; 2.提出基于“分-治”策略的采样区域划分方法,以克服边界聚类分布的局部特性;3.开发了一种结合边界聚类和视图采样的三维重建自主规划方法,用边界聚类评估采样到的视图序列,以实现完整、高效的建筑物表面覆盖。
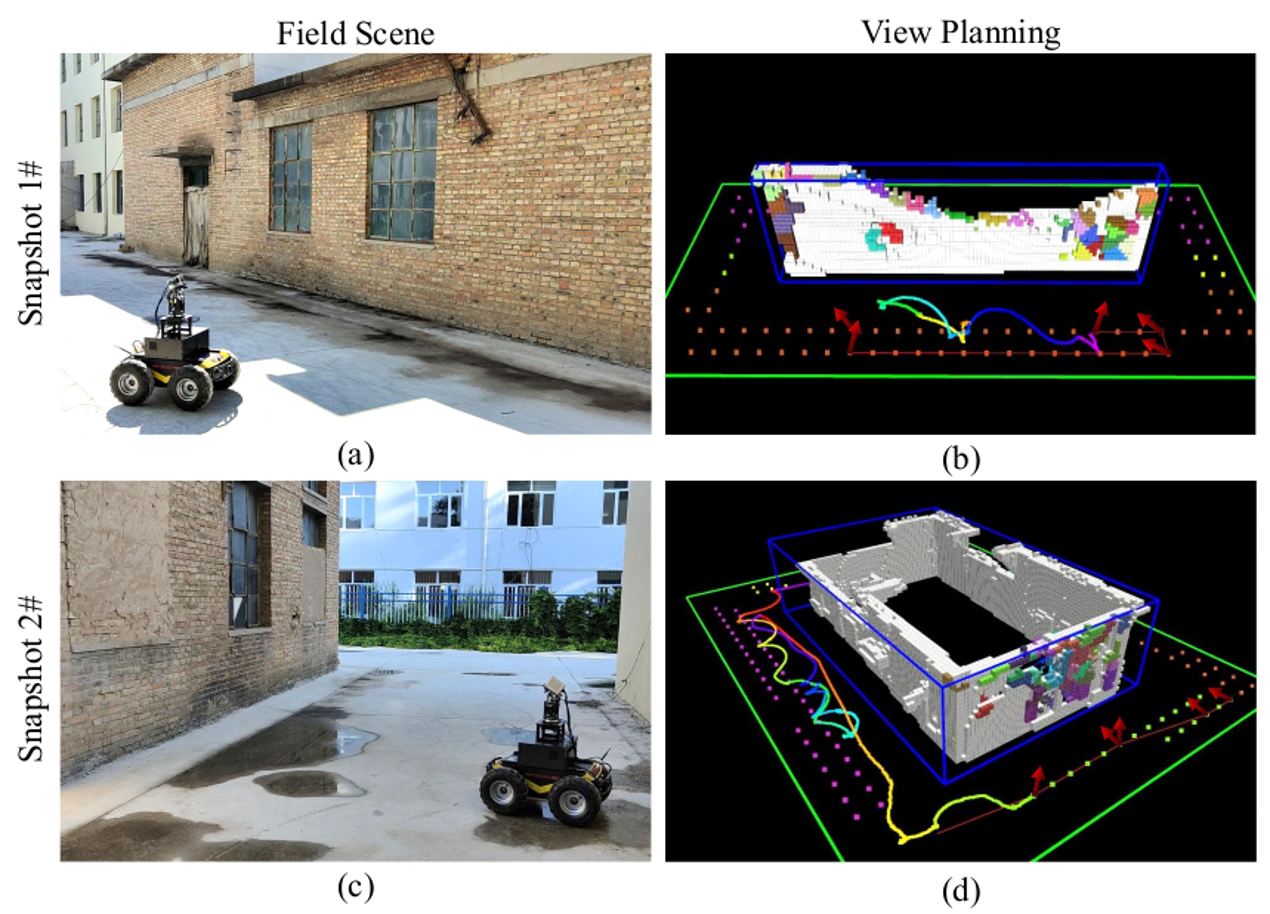
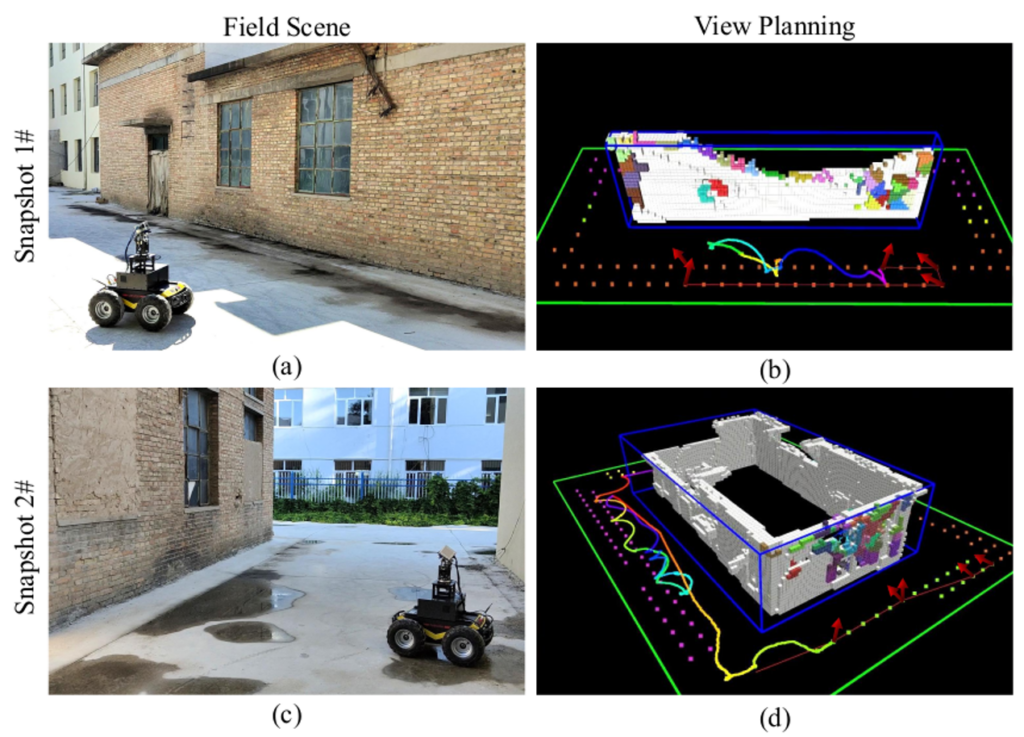
该方法在单/多建筑物重建任务中,相比SOTA方法取得了重建效率和重建完整度的提升,并提供了一种针对固态激光雷达和地面移动机器人的视图规划方案(如图2所示),对于实现户外机器人在复杂环境下的自主重建有重要意义。
Yuxiang Li, Jiancheng Wang, Haoyao Chen, Xin Jiang, Yunhui Liu, “Object-Aware View Planning for Autonomous 3D Model Reconstruction of Buildings Using a Mobile Robot”, IEEE Transactions on Instrumentation and Measurement, online, 2023. https://doi.org/10.1109/TIM.2023.3279424